 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Factors: Design Principles for AI Humanoids in Human Worlds
Feb 10, 2026Human factors research has long focused on optimizing environments, tools, and systems to account for human performance. Yet, as humanoid robots begin to share our workplaces, homes, and public spaces, the design challenge expands. We must now consider not only factors for humans but also factors for humanoids, since both will coexist and interact within the same environments. Unlike conventional machines, humanoids introduce expectations of human-like behavior, communication, and social presence, which reshape usability, trust, and safety considerations. In this article, we introduce the concept of humanoid factors as a framework structured around four pillars - physical, cognitive, social, and ethical - that shape the development of humanoids to help them effectively coexist and collaborate with humans. This framework characterizes the overlap and divergence between human capabilities and those of general-purpose humanoids powered by AI foundation models. To demonstrate our framework's practical utility, we then apply the framework to evaluate a real-world humanoid control algorithm, illustrating how conventional task completion metrics in robotics overlook key human cognitive and interaction principles. We thus position humanoid factors as a foundational framework for designing, evaluating, and governing sustained human-humanoid coexistence.
Continual Skill and Task Learning via Dialogue
Sep 05, 2024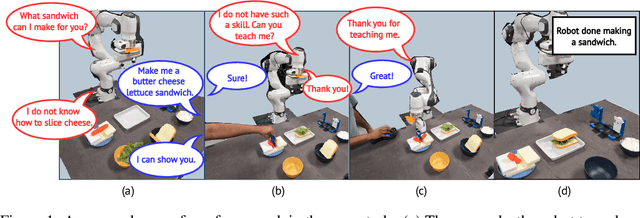
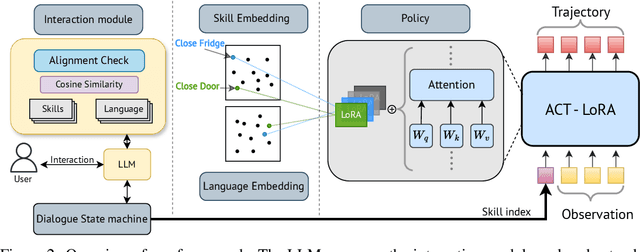
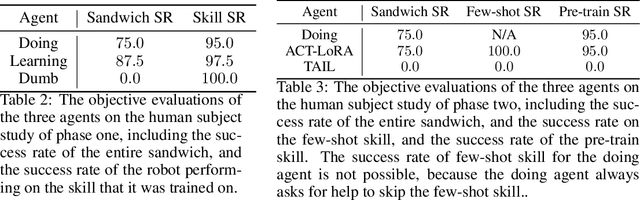

Continual and interactive robot learning is a challenging problem as the robot is present with human users who expect the robot to learn novel skills to solve novel tasks perpetually with sample efficiency. In this work we present a framework for robots to query and learn visuo-motor robot skills and task relevant information via natural language dialog interactions with human users. Previous approaches either focus on improving the performance of instruction following agents, or passively learn novel skills or concepts. Instead, we used dialog combined with a language-skill grounding embedding to query or confirm skills and/or tasks requested by a user. To achieve this goal, we developed and integrated three different components for our agent. Firstly, we propose a novel visual-motor control policy ACT with Low Rank Adaptation (ACT-LoRA), which enables the existing SoTA ACT model to perform few-shot continual learning. Secondly, we develop an alignment model that projects demonstrations across skill embodiments into a shared embedding allowing us to know when to ask questions and/or demonstrations from users. Finally, we integrated an existing LLM to interact with a human user to perform grounded interactive continual skill learning to solve a task. Our ACT-LoRA model learns novel fine-tuned skills with a 100% accuracy when trained with only five demonstrations for a novel skill while still maintaining a 74.75% accuracy on pre-trained skills in the RLBench dataset where other models fall significantly short. We also performed a human-subjects study with 8 subjects to demonstrate the continual learning capabilities of our combined framework. We achieve a success rate of 75% in the task of sandwich making with the real robot learning from participant data demonstrating that robots can learn novel skills or task knowledge from dialogue with non-expert users using our approach.
Improving the State of the Art for Training Human-AI Teams: Technical Report #3 -- Analysis of Testbed Alternatives
Aug 29, 2023Sonalysts is working on an initiative to expand our current expertise in teaming to Human-Artificial Intelligence (AI) teams by developing original research in this area. To provide a foundation for that research, Sonalysts is investigating the development of a Synthetic Task Environment (STE). In a previous report, we documented the findings of a recent outreach effort in which we asked military Subject Matter Experts (SMEs) and other researchers in the Human-AI teaming domain to identify the qualities that they most valued in a testbed. A surprising finding from that outreach was that several respondents recommended that our team look into existing human-AI teaming testbeds, rather than creating something new. Based on that recommendation, we conducted a systematic investigation of the associated landscape. In this report, we describe the results of that investigation. Building on the survey results, we developed testbed evaluation criteria, identified potential testbeds, and conducted qualitative and quantitative evaluations of candidate testbeds. The evaluation process led to five candidate testbeds for the research team to consider. In the coming months, we will assess the viability of the various alternatives and begin to execute our program of research.