 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA General Lie-Group Framework for Continuum Soft Robot Modeling
Mar 09, 2026This paper introduces a general Lie group framework for modeling continuum soft robots, employing Cosserat rod theory combined with cumulative parameterization on the Lie group SE(3). This novel approach addresses limitations present in current strain-based and configuration-based methods by providing geometric local control and eliminating unit quaternion constraints. The paper derives unified analytical expressions for kinematics, statics, and dynamics, including recursive Jacobian computations and an energy-conserving integrator suitable for real-time simulation and control. Additionally, the framework is extended to handle complex robotic structures, including segmented, branched, nested, and rigid-soft composite configurations, facilitating a modular and unified modeling strategy. The effectiveness, generality, and computational efficiency of the proposed methodology are demonstrated through various scenarios, including large-deformation rods, concentric tube robots, parallel robots, cable-driven robots, and articulated fingers. This work enhances modeling flexibility and numerical performance, providing an improved toolset for designing, simulating, and controlling soft robotic systems.
Constraint-Free Static Modeling of Continuum Parallel Robot
Mar 05, 2026Continuum parallel robots (CPR) combine rigid actuation mechanisms with multiple elastic rods in a closed-loop topology, making forward statics challenging when rigid--continuum junctions are enforced by explicit kinematic constraints. Such constraint-based formulations typically introduce additional algebraic variables and complicate both numerical solution and downstream control. This paper presents a geometric exact, configuration-based and constraint-free static model of CPR that remains valid under geometrically nonlinear, large-deformation and large-rotation conditions. Connectivity constraints are eliminated by kinematic embedding, yielding a reduced unconstrained problem. Each rod of CPR is discretized by nodal poses on SE(3), while the element-wise strain field is reconstructed through a linear strain parameterization. A fourth-order Magnus approximation yields an explicit and geometrically consistent mapping between element end poses and the strain. Rigid attachments at the motor-driven base and the end-effector platforms are handled through kinematic embeddings. Based on total potential energy and virtual work, we derive assembly-ready residuals and explicit Newton tangents, and solve the resulting nonlinear equilibrium equations using a Riemannian Newton iteration on the product manifold. Experiments on a three-servomotor, six-rod prototype validate the model by showing good agreement between simulation and measurements for both unloaded motions and externally loaded cases.
CT-Enabled Patient-Specific Simulation and Contact-Aware Robotic Planning for Cochlear Implantation
Mar 05, 2026Robotic cochlear-implant (CI) insertion requires precise prediction and regulation of contact forces to minimize intracochlear trauma and prevent failure modes such as locking and buckling. Aligned with the integration of advanced medical imaging and robotics for autonomous, precision interventions, this paper presents a unified CT-to-simulation pipeline for contact-aware insertion planning and validation. We develop a low-dimensional, differentiable Cosserat-rod model of the electrode array coupled with frictional contact and pseudo-dynamics regularization to ensure continuous stick-slip transitions. Patient-specific cochlear anatomy is reconstructed from CT imaging and encoded via an analytic parametrization of the scala-tympani lumen, enabling efficient and differentiable contact queries through closest-point projection. Based on a differentiated equilibrium-constraint formulation, we derive an online direction-update law under an RCM-like constraint that suppresses lateral insertion forces while maintaining axial advancement. Simulations and benchtop experiments validate deformation and force trends, demonstrating reduced locking/buckling risk and improved insertion depth. The study highlights how CT-based imaging enhances modeling, planning, and safety capabilities in robot-assisted inner-ear procedures.
Cosserat-Rod Based Dynamic Modeling of Soft Slender Robot Interacting with Environment
Jul 12, 2023

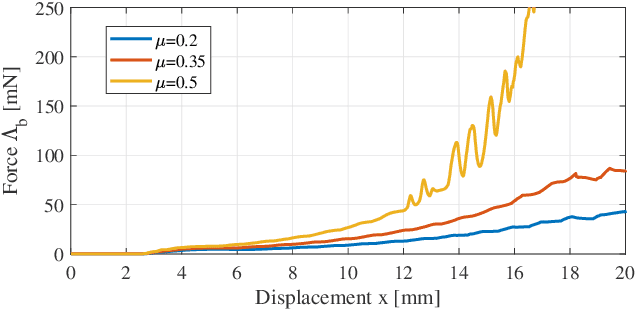
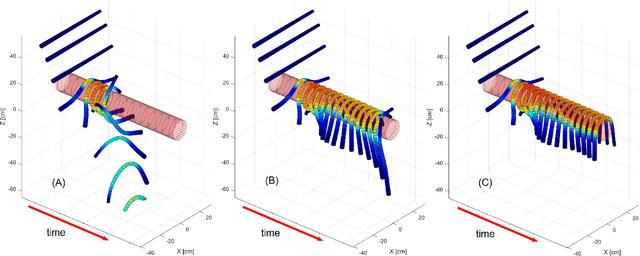
Soft slender robots have attracted more and more research attentions in these years due to their continuity and compliance natures. However, mechanics modeling for soft robots interacting with environment is still an academic challenge because of the non-linearity of deformation and the non-smooth property of the contacts. In this work, starting from a piece-wise local strain field assumption, we propose a nonlinear dynamic model for soft robot via Cosserat rod theory using Newtonian mechanics which handles the frictional contact with environment and transfer them into the nonlinear complementary constraint (NCP) formulation. Moreover, we smooth both the contact and friction constraints in order to convert the inequality equations of NCP to the smooth equality equations. The proposed model allows us to compute the dynamic deformation and frictional contact force under common optimization framework in real time when the soft slender robot interacts with other rigid or soft bodies. In the end, the corresponding experiments are carried out which valid our proposed dynamic model.
Piecewise Linear Strain Cosserat Model for Soft Slender Manipulator
Jun 07, 2022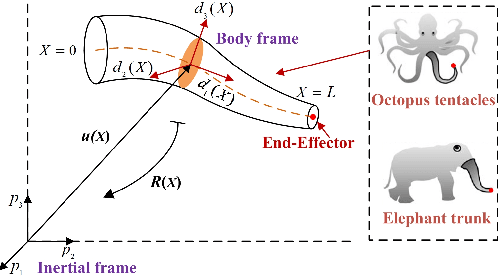
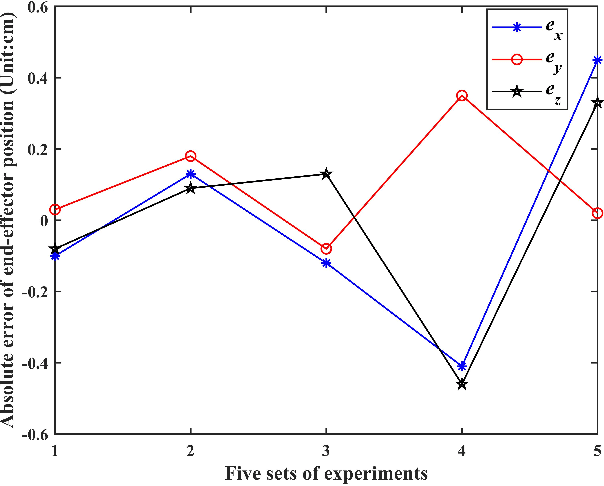
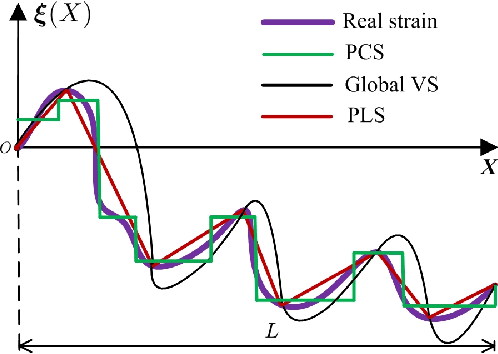
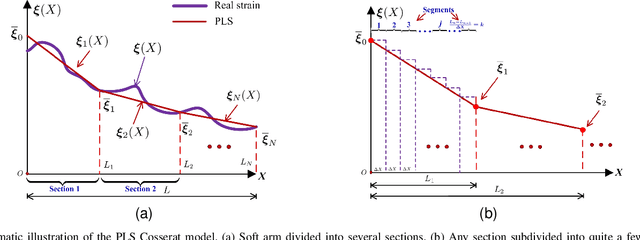
Recently soft robotics has rapidly become a novel and promising area of research with many designs and applications due to their flexible and compliant structure. However, it is more difficult to derive the nonlinear dynamic model of such soft robots. The differential kinematics and dynamics of the soft manipulator can be formulated as a set of highly nonlinear partial differential equations (PDEs) via the classic Cosserat rod theory. In this work, we propose a discrete modeling technique named piecewise linear strain (PLS) to solve the PDEs of Cosserat-based models, based on which the associated analytic models are deduced. To validate the accuracy of the proposed Cosserat model, the static model of the conical cantilever rod under gravity as a simple example is simulated by using different discretization methods. Results indicate that PLS Cosserat model is comparable to the mechanical deformation behavior of real-world soft manipulator. Finally, a parameters identification scheme for this model is established, and the simulation as well as experimental validation demonstrate that using this method can identify the model physical parameters with high accuracy.