Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeController Synthesis from Noisy-Input Noisy-Output Data
Feb 04, 2024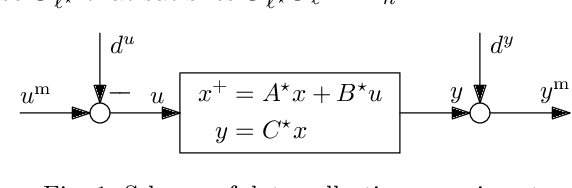
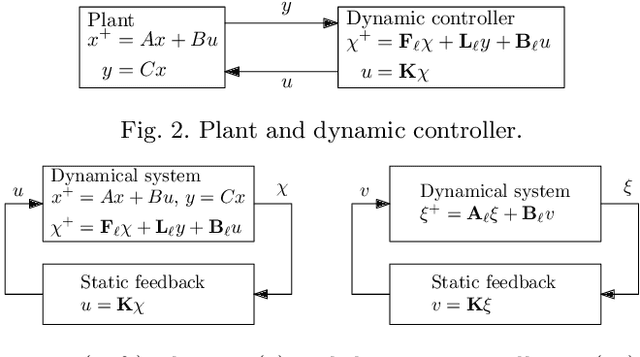
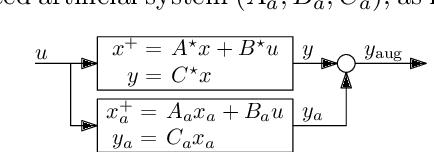
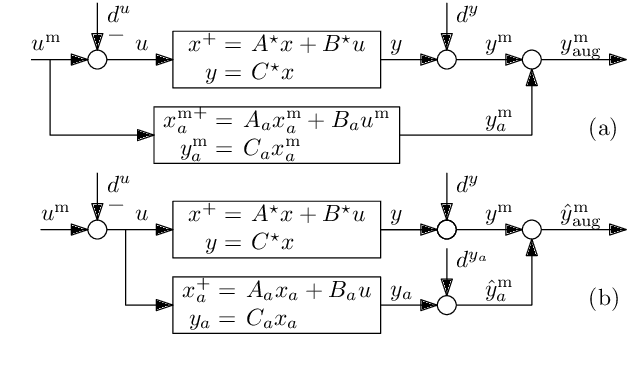
We consider the problem of synthesizing a dynamic output-feedback controller for a linear system, using solely input-output data corrupted by measurement noise. To handle input-output data, an auxiliary representation of the original system is introduced. By exploiting the structure of the auxiliary system, we design a controller that robustly stabilizes all possible systems consistent with data. Notably, we also provide a novel solution to extend the results to generic multi-input multi-output systems. The findings are illustrated by numerical examples.
Via