 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePush, Stop, and Replan: An Application of Pebble Motion on Graphs to Planning in Automated Warehouses
Jul 20, 2020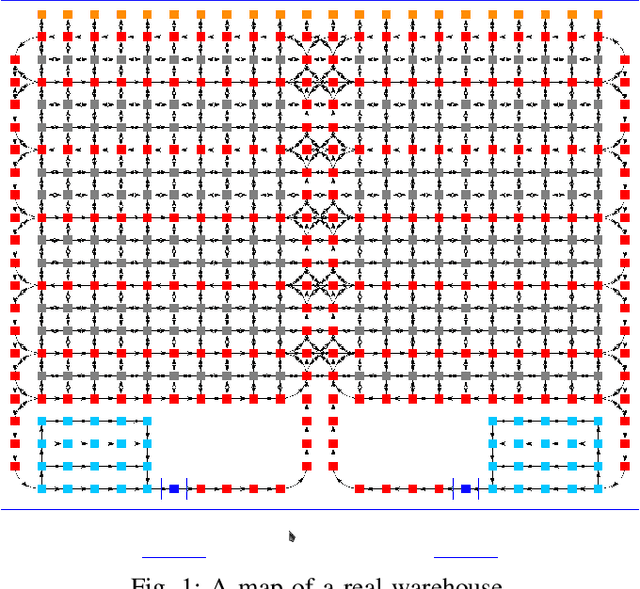

The pebble-motion on graphs is a subcategory of multi-agent pathfinding problems dealing with moving multiple pebble-like objects from a node to a node in a graph with a constraint that only one pebble can occupy one node at a given time. Additionally, algorithms solving this problem assume that individual pebbles (robots) cannot move at the same time and their movement is discrete. These assumptions disqualify them from being directly used in practical applications, although they have otherwise nice theoretical properties. We present modifications of the Push and Rotate algorithm [1], which relax the presumptions mentioned above and demonstrate, through a set of experiments, that the modified algorithm is applicable for planning in automated warehouses.