 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNuclear Microreactor Control with Deep Reinforcement Learning
Mar 31, 2025The economic feasibility of nuclear microreactors will depend on minimizing operating costs through advancements in autonomous control, especially when these microreactors are operating alongside other types of energy systems (e.g., renewable energy). This study explores the application of deep reinforcement learning (RL) for real-time drum control in microreactors, exploring performance in regard to load-following scenarios. By leveraging a point kinetics model with thermal and xenon feedback, we first establish a baseline using a single-output RL agent, then compare it against a traditional proportional-integral-derivative (PID) controller. This study demonstrates that RL controllers, including both single- and multi-agent RL (MARL) frameworks, can achieve similar or even superior load-following performance as traditional PID control across a range of load-following scenarios. In short transients, the RL agent was able to reduce the tracking error rate in comparison to PID. Over extended 300-minute load-following scenarios in which xenon feedback becomes a dominant factor, PID maintained better accuracy, but RL still remained within a 1% error margin despite being trained only on short-duration scenarios. This highlights RL's strong ability to generalize and extrapolate to longer, more complex transients, affording substantial reductions in training costs and reduced overfitting. Furthermore, when control was extended to multiple drums, MARL enabled independent drum control as well as maintained reactor symmetry constraints without sacrificing performance -- an objective that standard single-agent RL could not learn. We also found that, as increasing levels of Gaussian noise were added to the power measurements, the RL controllers were able to maintain lower error rates than PID, and to do so with less control effort.
Multistep Criticality Search and Power Shaping in Microreactors with Reinforcement Learning
Jun 22, 2024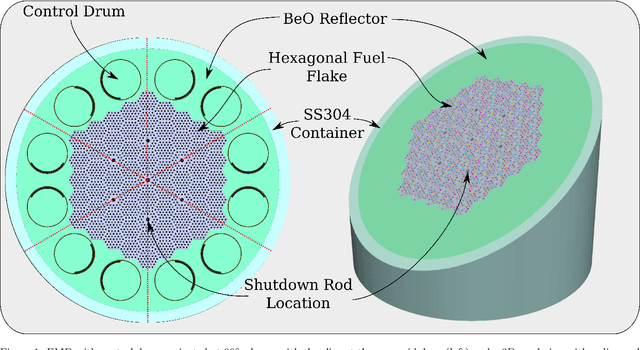
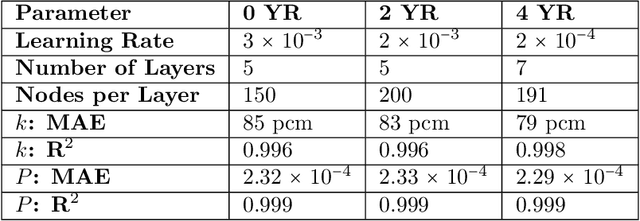
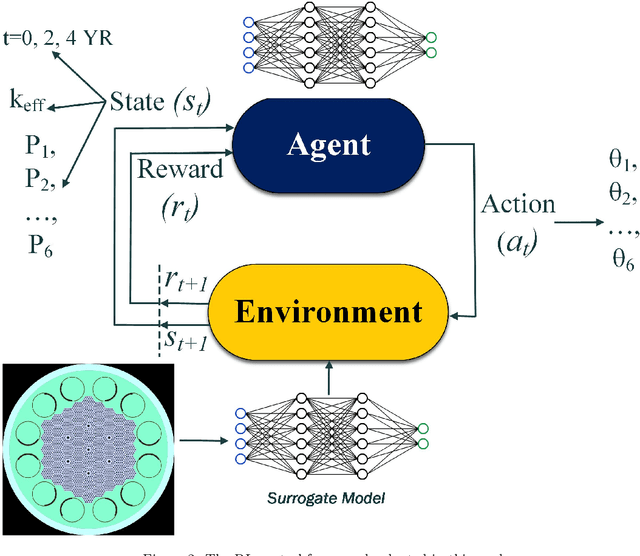
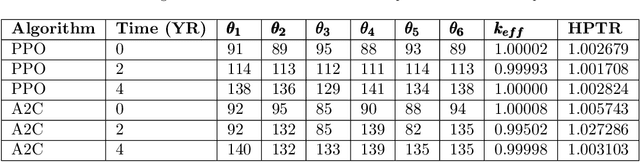
Reducing operation and maintenance costs is a key objective for advanced reactors in general and microreactors in particular. To achieve this reduction, developing robust autonomous control algorithms is essential to ensure safe and autonomous reactor operation. Recently, artificial intelligence and machine learning algorithms, specifically reinforcement learning (RL) algorithms, have seen rapid increased application to control problems, such as plasma control in fusion tokamaks and building energy management. In this work, we introduce the use of RL for intelligent control in nuclear microreactors. The RL agent is trained using proximal policy optimization (PPO) and advantage actor-critic (A2C), cutting-edge deep RL techniques, based on a high-fidelity simulation of a microreactor design inspired by the Westinghouse eVinci\textsuperscript{TM} design. We utilized a Serpent model to generate data on drum positions, core criticality, and core power distribution for training a feedforward neural network surrogate model. This surrogate model was then used to guide a PPO and A2C control policies in determining the optimal drum position across various reactor burnup states, ensuring critical core conditions and symmetrical power distribution across all six core portions. The results demonstrate the excellent performance of PPO in identifying optimal drum positions, achieving a hextant power tilt ratio of approximately 1.002 (within the limit of $<$ 1.02) and maintaining criticality within a 10 pcm range. A2C did not provide as competitive of a performance as PPO in terms of performance metrics for all burnup steps considered in the cycle. Additionally, the results highlight the capability of well-trained RL control policies to quickly identify control actions, suggesting a promising approach for enabling real-time autonomous control through digital twins.