 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProofs of Control of a Quadrotor and a Ground Vehicle Manipulating an Object
May 09, 2018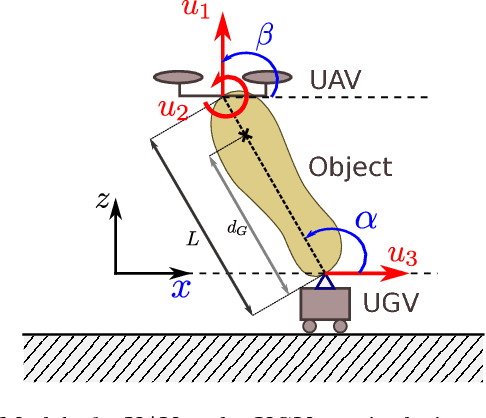



This paper focuses on the control of a cooperative system composed of an Unmanned Aerial Vehicle (UAV) and an Unmanned Ground Vehicle (UGV) manipulating an object. The two units are subject to input saturations and collaborate to move the object to a desired pose characterized by its position and inclination. The dynamics are derived using Euler-Lagrange method. A pre-stabilizing control law is proposed where the UGV is tasked to deploy the object to a certain position whereas the UAV adjusts its inclination. In particular, a proportional-derivative control law is proposed for the UGV, and a cascade control approach is used for the UAV, where the inner loop controls the attitude of the UAV and the outer loop stabilizes the inclination of the object. Then, we prove the stability of the points of equilibrium using small gain arguments. To ensure constraints satisfaction at all times, a reference governor unit is added to the pre-stabilizing control scheme. Finally, numerical results combined with experimental results are provided to validate the effectiveness of the proposed control scheme in practice.