 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Calibration for Activity Based Models
Mar 08, 2022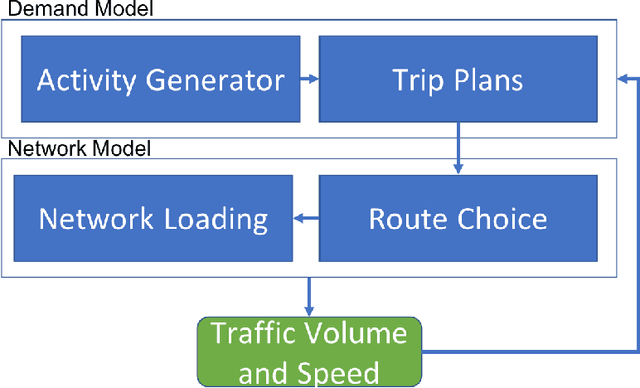


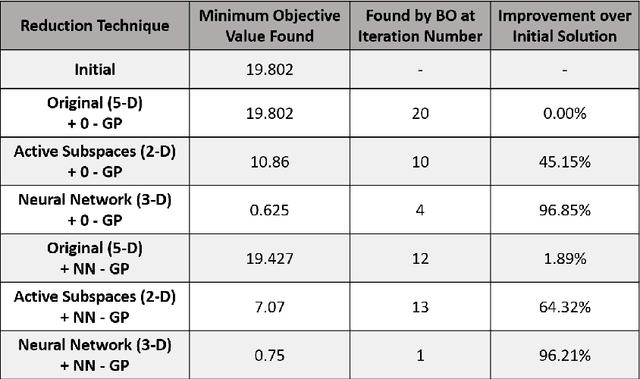
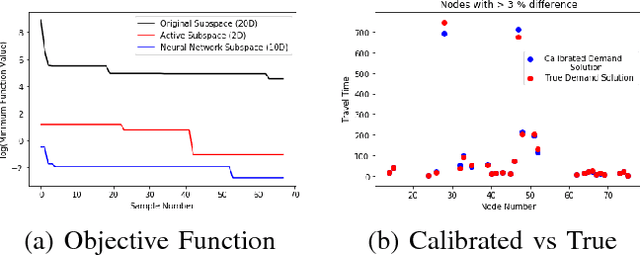
We consider the problem of calibration and uncertainty analysis for activity-based transportation simulators. ABMs rely on statistical models of traveler's behavior to predict travel patterns in a metropolitan area. Input parameters are typically estimated from traveler's surveys using maximum likelihood. We develop an approach that uses Gaussian process emulator to calibrate an activity-based model of a metropolitan transplantation system. Our approach extends traditional emulators to handle high-dimensional and non-stationary nature of the transportation simulator. Our methodology is applied to transportation simulator of Bloomington, Illinois. We calibrate key parameters of the model and compare to the ad-hoc calibration process.
Deep Reinforcement Learning for Dynamic Urban Transportation Problems
Jun 14, 2018
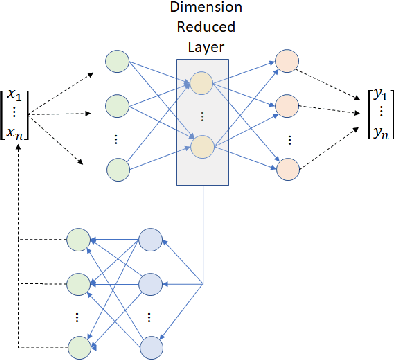
We explore the use of deep learning and deep reinforcement learning for optimization problems in transportation. Many transportation system analysis tasks are formulated as an optimization problem - such as optimal control problems in intelligent transportation systems and long term urban planning. Often transportation models used to represent dynamics of a transportation system involve large data sets with complex input-output interactions and are difficult to use in the context of optimization. Use of deep learning metamodels can produce a lower dimensional representation of those relations and allow to implement optimization and reinforcement learning algorithms in an efficient manner. In particular, we develop deep learning models for calibrating transportation simulators and for reinforcement learning to solve the problem of optimal scheduling of travelers on the network.