 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWave-Former: Through-Occlusion 3D Reconstruction via Wireless Shape Completion
Nov 19, 2025We present Wave-Former, a novel method capable of high-accuracy 3D shape reconstruction for completely occluded, diverse, everyday objects. This capability can open new applications spanning robotics, augmented reality, and logistics. Our approach leverages millimeter-wave (mmWave) wireless signals, which can penetrate common occlusions and reflect off hidden objects. In contrast to past mmWave reconstruction methods, which suffer from limited coverage and high noise, Wave-Former introduces a physics-aware shape completion model capable of inferring full 3D geometry. At the heart of Wave-Former's design is a novel three-stage pipeline which bridges raw wireless signals with recent advancements in vision-based shape completion by incorporating physical properties of mmWave signals. The pipeline proposes candidate geometric surfaces, employs a transformer-based shape completion model designed specifically for mmWave signals, and finally performs entropy-guided surface selection. This enables Wave-Former to be trained using entirely synthetic point-clouds, while demonstrating impressive generalization to real-world data. In head-to-head comparisons with state-of-the-art baselines, Wave-Former raises recall from 54% to 72% while maintaining a high precision of 85%.
RISE: Single Static Radar-based Indoor Scene Understanding
Nov 18, 2025Robust and privacy-preserving indoor scene understanding remains a fundamental open problem. While optical sensors such as RGB and LiDAR offer high spatial fidelity, they suffer from severe occlusions and introduce privacy risks in indoor environments. In contrast, millimeter-wave (mmWave) radar preserves privacy and penetrates obstacles, but its inherently low spatial resolution makes reliable geometric reasoning difficult. We introduce RISE, the first benchmark and system for single-static-radar indoor scene understanding, jointly targeting layout reconstruction and object detection. RISE is built upon the key insight that multipath reflections, traditionally treated as noise, encode rich geometric cues. To exploit this, we propose a Bi-Angular Multipath Enhancement that explicitly models Angle-of-Arrival and Angle-of-Departure to recover secondary (ghost) reflections and reveal invisible structures. On top of these enhanced observations, a simulation-to-reality Hierarchical Diffusion framework transforms fragmented radar responses into complete layout reconstruction and object detection. Our benchmark contains 50,000 frames collected across 100 real indoor trajectories, forming the first large-scale dataset dedicated to radar-based indoor scene understanding. Extensive experiments show that RISE reduces the Chamfer Distance by 60% (down to 16 cm) compared to the state of the art in layout reconstruction, and delivers the first mmWave-based object detection, achieving 58% IoU. These results establish RISE as a new foundation for geometry-aware and privacy-preserving indoor scene understanding using a single static radar.
3D Self-Localization of Drones using a Single Millimeter-Wave Anchor
Oct 12, 2023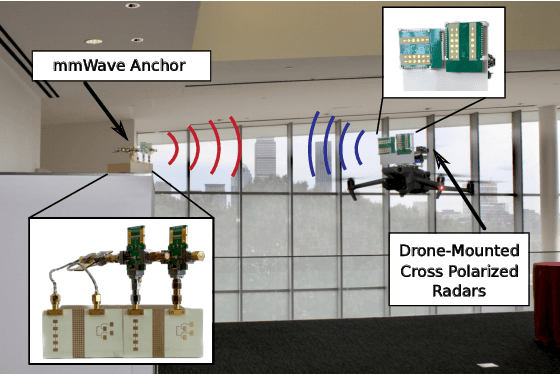
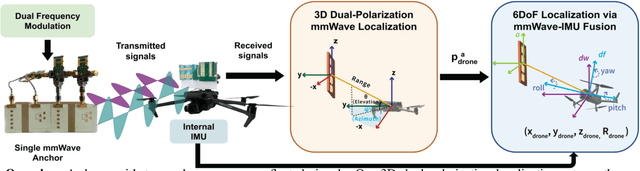
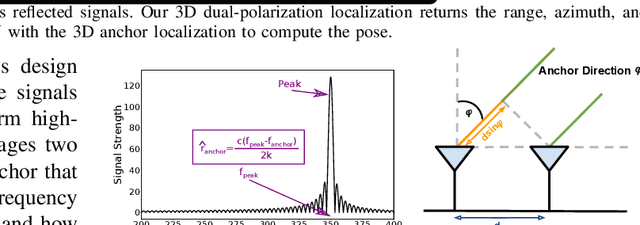
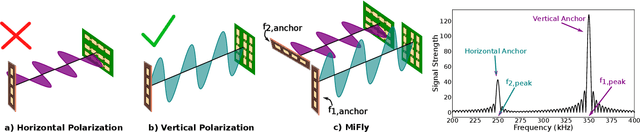
We present the design, implementation, and evaluation of MiFly, a self-localization system for autonomous drones that works across indoor and outdoor environments, including low-visibility, dark, and GPS-denied settings. MiFly performs 6DoF self-localization by leveraging a single millimeter-wave (mmWave) anchor in its vicinity - even if that anchor is visually occluded. MmWave signals are used in radar and 5G systems and can operate in the dark and through occlusions. MiFly introduces a new mmWave anchor design and mounts light-weight high-resolution mmWave radars on a drone. By jointly designing the localization algorithms and the novel low-power mmWave anchor hardware (including its polarization and modulation), the drone is capable of high-speed 3D localization. Furthermore, by intelligently fusing the location estimates from its mmWave radars and its IMUs, it can accurately and robustly track its 6DoF trajectory. We implemented and evaluated MiFly on a DJI drone. We demonstrate a median localization error of 7cm and a 90th percentile less than 15cm, even when the anchor is fully occluded (visually) from the drone.