 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Distribution of Minima in Intrinsic-Metric Rotation Averaging
Mar 18, 2020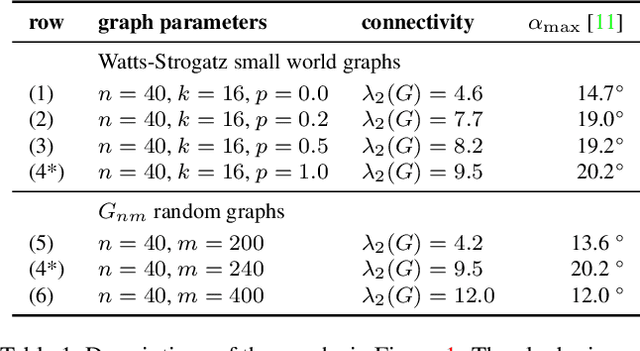
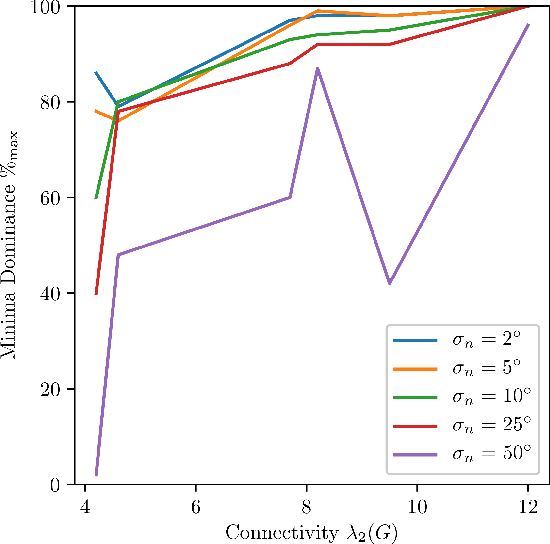
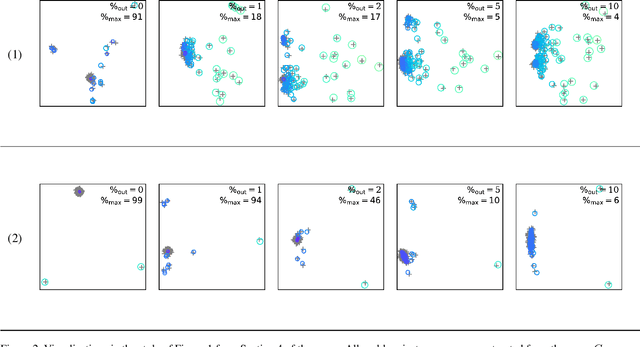
Rotation Averaging is a non-convex optimization problem that determines orientations of a collection of cameras from their images of a 3D scene. The problem has been studied using a variety of distances and robustifiers. The intrinsic (or geodesic) distance on SO(3) is geometrically meaningful; but while some extrinsic distance-based solvers admit (conditional) guarantees of correctness, no comparable results have been found under the intrinsic metric. In this paper, we study the spatial distribution of local minima. First, we do a novel empirical study to demonstrate sharp transitions in qualitative behavior: as problems become noisier, they transition from a single (easy-to-find) dominant minimum to a cost surface filled with minima. In the second part of this paper we derive a theoretical bound for when this transition occurs. This is an extension of the results of [24], which used local convexity as a proxy to study the difficulty of problem. By recognizing the underlying quotient manifold geometry of the problem we achieve an n-fold improvement over prior work. Incidentally, our analysis also extends the prior $l_2$ work to general $l_p$ costs. Our results suggest using algebraic connectivity as an indicator of problem difficulty.