 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlazeAIoT: A Modular Multi-Layer Platform for Real-Time Distributed Robotics Across Edge, Fog, and Cloud Infrastructures
Jan 09, 2026The increasing complexity of distributed robotics has driven the need for platforms that seamlessly integrate edge, fog, and cloud computing layers while meeting strict real-time constraints. This paper introduces BlazeAIoT, a modular multi-layer platform designed to unify distributed robotics across heterogeneous infrastructures. BlazeAIoT provides dynamic data transfer, configurable services, and integrated monitoring, while ensuring resilience, security, and programming language flexibility. The architecture leverages Kubernetes-based clusters, broker interoperability (DDS, Kafka, Redis, and ROS2), and adaptive data distribution mechanisms to optimize communication and computation across diverse environments. The proposed solution includes a multi-layer configuration service, dynamic and adaptive data bridging, and hierarchical rate limiting to handle large messages. The platform is validated through robotics scenarios involving navigation and artificial intelligence-driven large-scale message processing, demonstrating robust performance under real-time constraints. Results highlight BlazeAIoT's ability to dynamically allocate services across incomplete topologies, maintain system health, and minimize latency, making it a cost-aware, scalable solution for robotics and broader IoT applications, such as smart cities and smart factories.
Securing Fog-to-Things Environment Using Intrusion Detection System Based On Ensemble Learning
Jan 30, 2019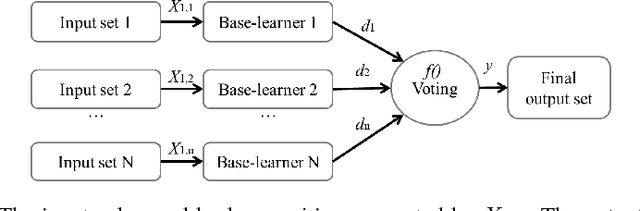
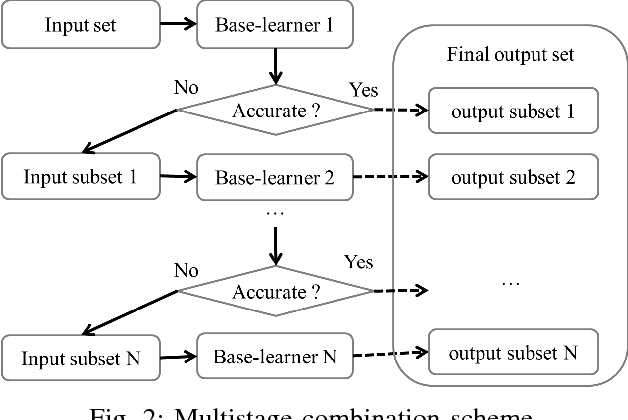
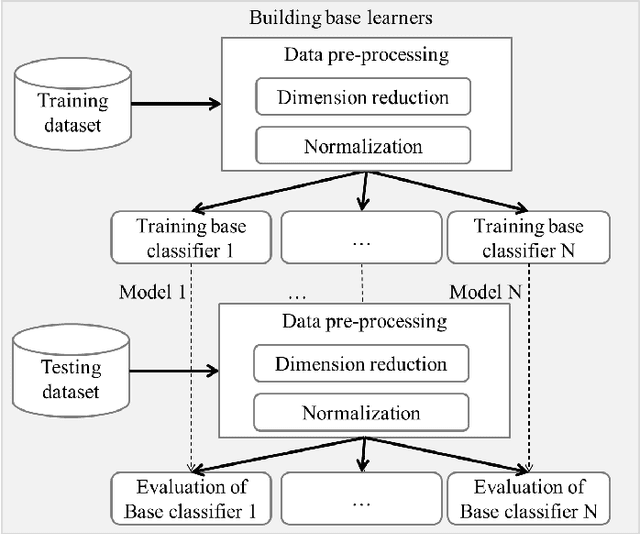
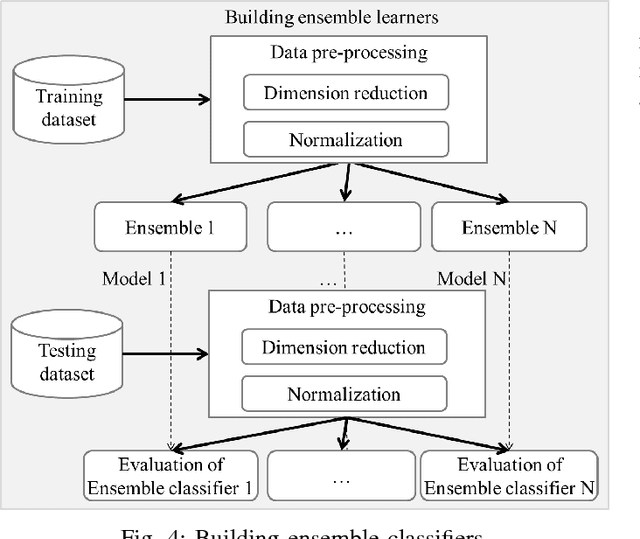
The growing interest in the Internet of Things (IoT) applications is associated with an augmented volume of security threats. In this vein, the Intrusion detection systems (IDS) have emerged as a viable solution for the detection and prevention of malicious activities. Unlike the signature-based detection approaches, machine learning-based solutions are a promising means for detecting unknown attacks. However, the machine learning models need to be accurate enough to reduce the number of false alarms. More importantly, they need to be trained and evaluated on realistic datasets such that their efficacy can be validated on real-time deployments. Many solutions proposed in the literature are reported to have high accuracy but are ineffective in real applications due to the non-representativity of the dataset used for training and evaluation of the underlying models. On the other hand, some of the existing solutions overcome these challenges but yield low accuracy which hampers their implementation for commercial tools. These solutions are majorly based on single learners and are therefore directly affected by the intrinsic limitations of each learning algorithm. The novelty of this paper is to use the most realistic dataset available for intrusion detection called NSL-KDD, and combine multiple learners to build ensemble learners that increase the accuracy of the detection. Furthermore, a deployment architecture in a fog-to-things environment that employs two levels of classifications is proposed. In such architecture, the first level performs an anomaly detection which reduces the latency of the classification substantially, while the second level, executes attack classifications, enabling precise prevention measures. Finally, the experimental results demonstrate the effectiveness of the proposed IDS in comparison with the other state-of-the-arts on the NSL-KDD dataset.