 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMethodology to analyze the accuracy of 3D objects reconstructed with collaborative robot based monocular LSD-SLAM
Mar 06, 2018

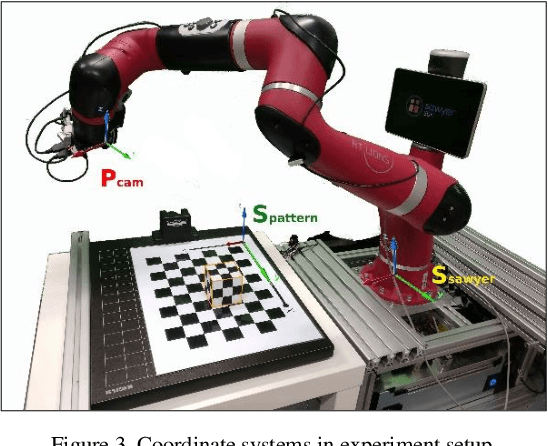
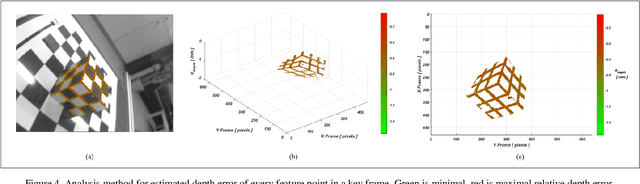
SLAM systems are mainly applied for robot navigation while research on feasibility for motion planning with SLAM for tasks like bin-picking, is scarce. Accurate 3D reconstruction of objects and environments is important for planning motion and computing optimal gripper pose to grasp objects. In this work, we propose the methods to analyze the accuracy of a 3D environment reconstructed using a LSD-SLAM system with a monocular camera mounted onto the gripper of a collaborative robot. We discuss and propose a solution to the pose space conversion problem. Finally, we present several criteria to analyze the 3D reconstruction accuracy. These could be used as guidelines to improve the accuracy of 3D reconstructions with monocular LSD-SLAM and other SLAM based solutions.
Closed-form Solution for IMU based LSD-SLAM Point Cloud Conversion into the Scaled 3D World Environment
Jul 19, 2017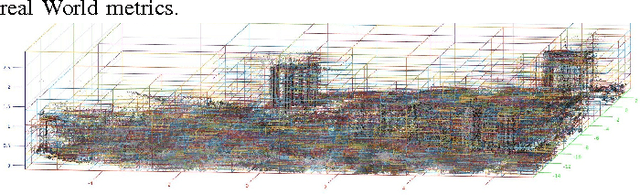
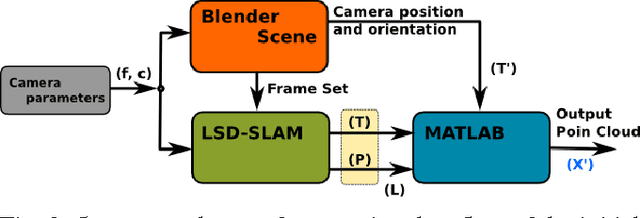
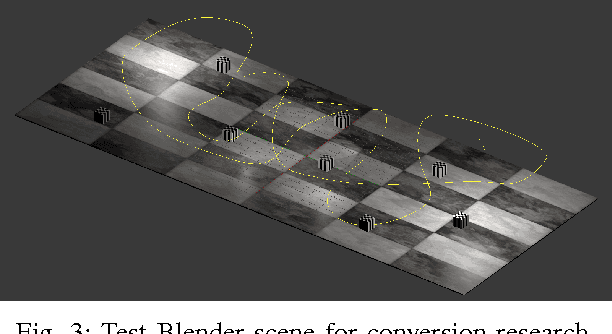
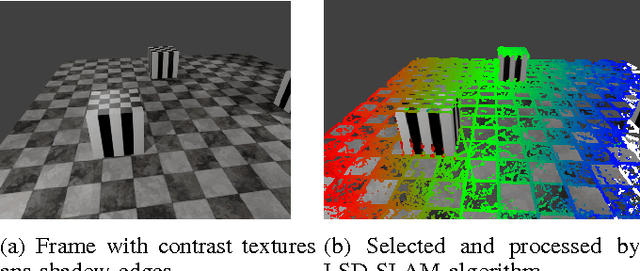
SLAM is a very popular research stream in computer vision and robotics nowadays. For more effective SLAM implementation it is necessary to have reliable informa- tion about the environment, also the data should be aligned and scaled according to the real world coordinate system. Monocular SLAM research is an attractive sub-stream, because of the low equipment cost, size and weight. In this paper we present a way to build a conversion from LSD-SLAM coordinate space to the real world coordinates using a true metric scale with IMU sensor data implementation. The causes of differences between the real and calculated spaces are explained and the possibility of conversions between the spaces is proved. Additionally, a closed-form solution for inter space trans- formation calculation is presented. The synthetic method of generating high level accurate and well controlled input data for the LSD-SLAM algorithm is presented. Finally, the reconstructed 3D environment representation is delivered as an output of the implemented conversion.