 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValue-of-Information based Arbitration between Model-based and Model-free Control
Dec 08, 2019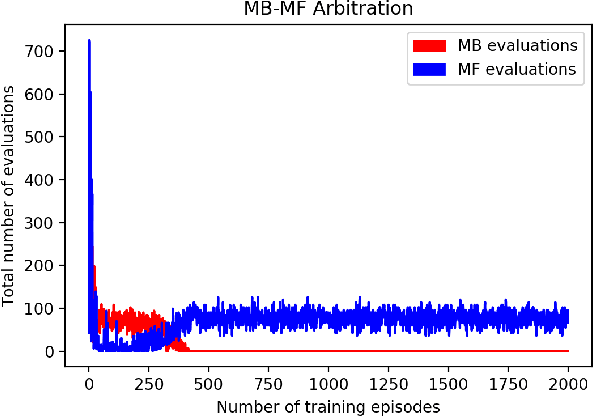
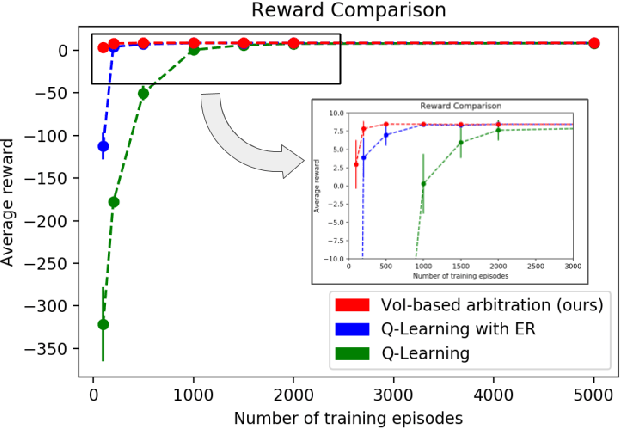
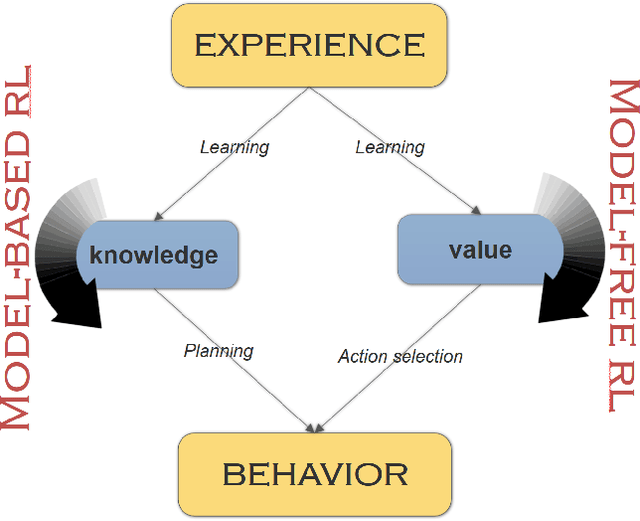
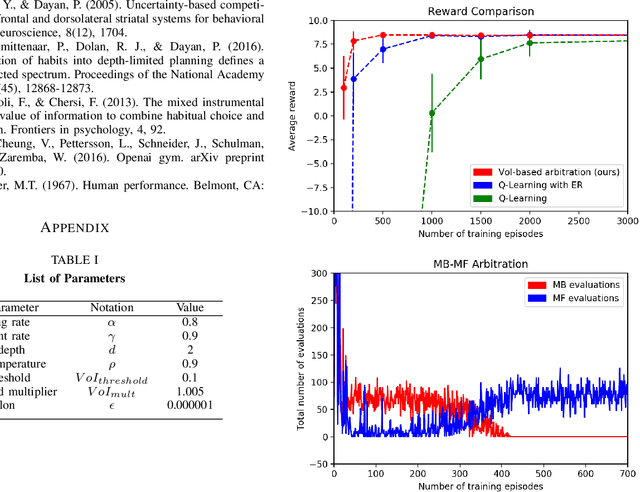
There have been numerous attempts in explaining the general learning behaviours using model-based and model-free methods. While the model-based control is flexible yet computationally expensive in planning, the model-free control is quick but inflexible. The model-based control is therefore immune from reward devaluation and contingency degradation. Multiple arbitration schemes have been suggested to achieve the data efficiency and computational efficiency of model-based and model-free control respectively. In this context, we propose a quantitative 'value of information' based arbitration between both the controllers in order to establish a general computational framework for skill learning. The interacting model-based and model-free reinforcement learning processes are arbitrated using an uncertainty-based value of information. We further show that our algorithm performs better than Q-learning as well as Q-learning with experience replay.
A Computational Framework for Motor Skill Acquisition
Jan 03, 2019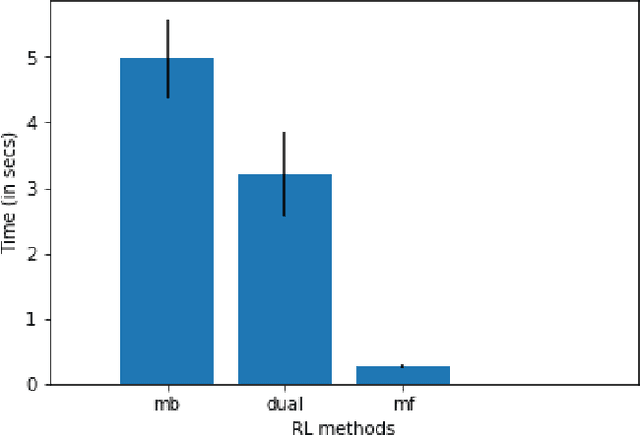
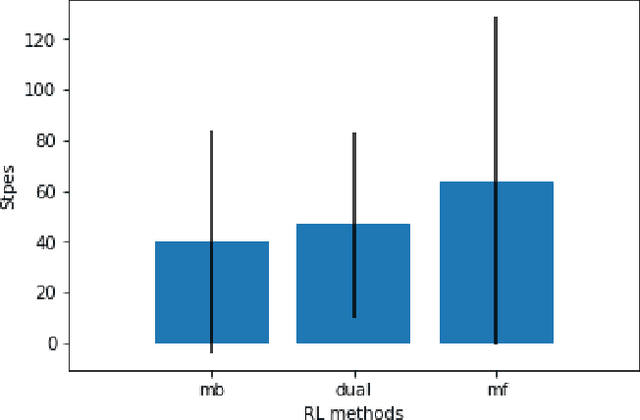
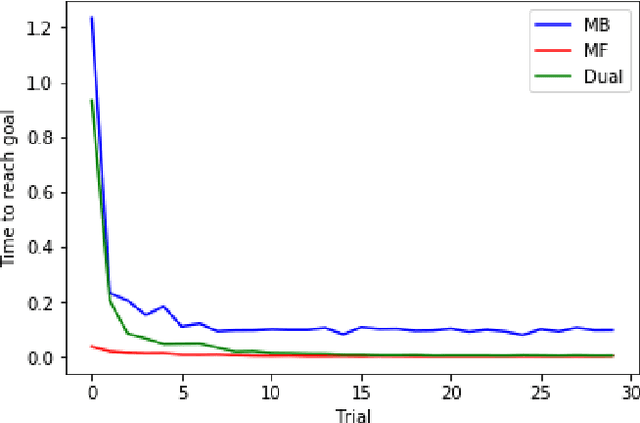
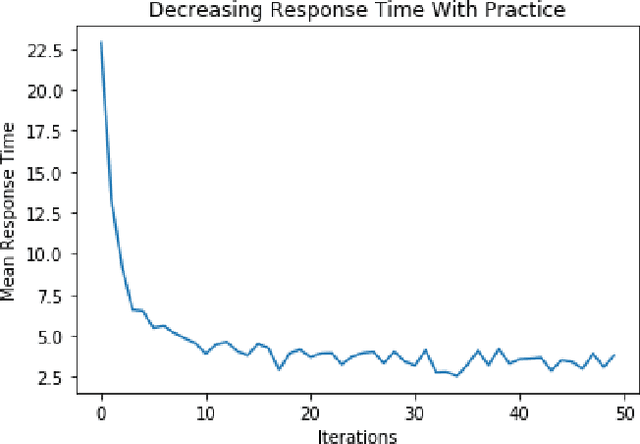
There have been numerous attempts in explaining the general learning behaviours by various cognitive models. Multiple hypotheses have been put further to qualitatively argue the best-fit model for motor skill acquisition task and its variations. In this context, for a discrete sequence production (DSP) task, one of the most insightful models is Verwey's Dual Processor Model (DPM). It largely explains the learning and behavioural phenomenon of skilled discrete key-press sequences without providing any concrete computational basis of reinforcement. Therefore, we propose a quantitative explanation for Verwey's DPM hypothesis by experimentally establishing a general computational framework for motor skill learning. We attempt combining the qualitative and quantitative theories based on a best-fit model of the experimental simulations of variations of dual processor models. The fundamental premise of sequential decision making for skill learning is based on interacting model-based (MB) and model-free (MF) reinforcement learning (RL) processes. Our unifying framework shows the proposed idea agrees well to Verwey's DPM and Fitts' three phases of skill learning. The accuracy of our model can further be validated by its statistical fit with the human-generated data on simple environment tasks like the grid-world.