 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext-Enriched Natural Language Descriptions of Vessel Trajectories
Mar 08, 2026We address the problem of transforming raw vessel trajectory data collected from AIS into structured and semantically enriched representations interpretable by humans and directly usable by machine reasoning systems. We propose a context-aware trajectory abstraction framework that segments noisy AIS sequences into distinct trips each consisting of clean, mobility-annotated episodes. Each episode is further enriched with multi-source contextual information, such as nearby geographic entities, offshore navigation features, and weather conditions. Crucially, such representations can support generation of controlled natural language descriptions using LLMs. We empirically examine the quality of such descriptions generated using several LLMs over AIS data along with open contextual features. By increasing semantic density and reducing spatiotemporal complexity, this abstraction can facilitate downstream analytics and enable integration with LLMs for higher-level maritime reasoning tasks.
Data-Driven Trajectory Imputation for Vessel Mobility Analysis
Feb 12, 2026Modeling vessel activity at sea is critical for a wide range of applications, including route planning, transportation logistics, maritime safety, and environmental monitoring. Over the past two decades, the Automatic Identification System (AIS) has enabled real-time monitoring of hundreds of thousands of vessels, generating huge amounts of data daily. One major challenge in using AIS data is the presence of large gaps in vessel trajectories, often caused by coverage limitations or intentional transmission interruptions. These gaps can significantly degrade data quality, resulting in inaccurate or incomplete analysis. State-of-the-art imputation approaches have mainly been devised to tackle gaps in vehicle trajectories, even when the underlying road network is not considered. But the motion patterns of sailing vessels differ substantially, e.g., smooth turns, maneuvering near ports, or navigating in adverse weather conditions. In this application paper, we propose HABIT, a lightweight, configurable H3 Aggregation-Based Imputation framework for vessel Trajectories. This data-driven framework provides a valuable means to impute missing trajectory segments by extracting, analyzing, and indexing motion patterns from historical AIS data. Our empirical study over AIS data across various timeframes, densities, and vessel types reveals that HABIT produces maritime trajectory imputations performing comparably to baseline methods in terms of accuracy, while performing better in terms of latency while accounting for vessel characteristics and their motion patterns.
Hippasus: Effective and Efficient Automatic Feature Augmentation for Machine Learning Tasks on Relational Data
Feb 02, 2026Machine learning models depend critically on feature quality, yet useful features are often scattered across multiple relational tables. Feature augmentation enriches a base table by discovering and integrating features from related tables through join operations. However, scaling this process to complex schemas with many tables and multi-hop paths remains challenging. Feature augmentation must address three core tasks: identify promising join paths that connect the base table to candidate tables, execute these joins to materialize augmented data, and select the most informative features from the results. Existing approaches face a fundamental tradeoff between effectiveness and efficiency: achieving high accuracy requires exploring many candidate paths, but exhaustive exploration is computationally prohibitive. Some methods compromise by considering only immediate neighbors, limiting their effectiveness, while others employ neural models that require expensive training data and introduce scalability limitations. We present Hippasus, a modular framework that achieves both goals through three key contributions. First, we combine lightweight statistical signals with semantic reasoning from Large Language Models to prune unpromising join paths before execution, focusing computational resources on high-quality candidates. Second, we employ optimized multi-way join algorithms and consolidate features from multiple paths, substantially reducing execution time. Third, we integrate LLM-based semantic understanding with statistical measures to select features that are both semantically meaningful and empirically predictive. Our experimental evaluation on publicly available datasets shows that Hippasus substantially improves feature augmentation accuracy by up to 26.8% over state-of-the-art baselines while also offering high runtime performance.
Optimizing Vessel Trajectory Compression
May 11, 2020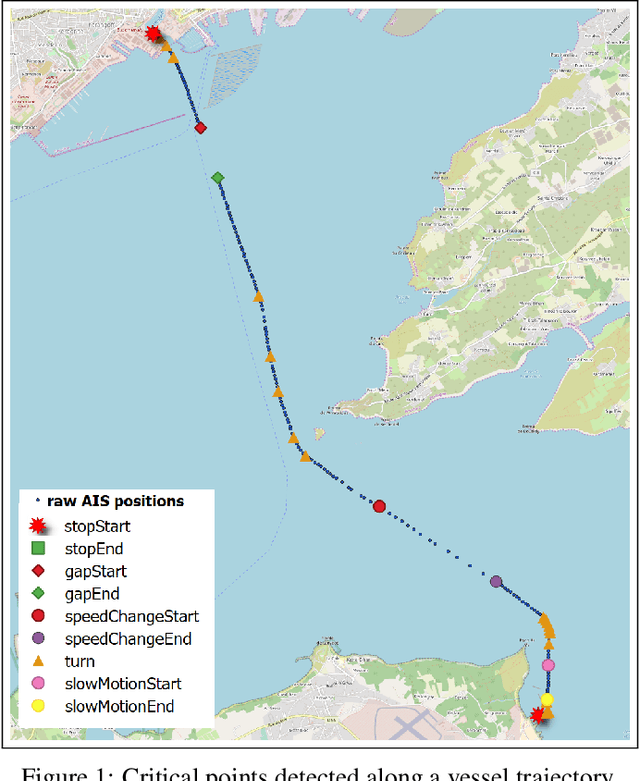
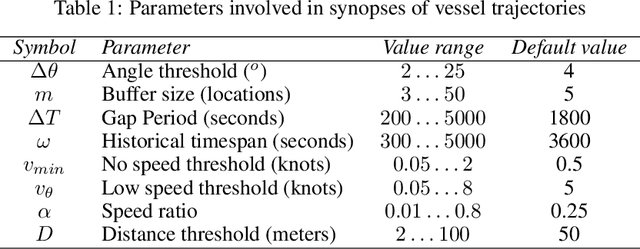
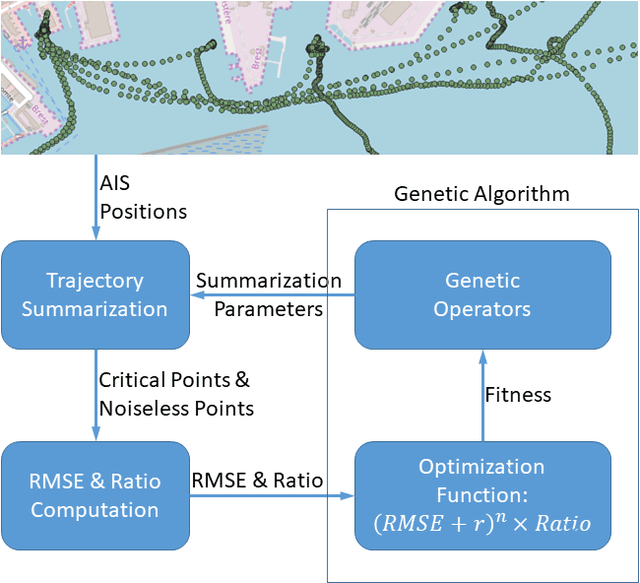
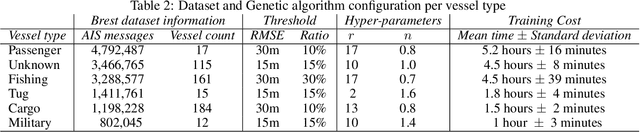
In previous work we introduced a trajectory detection module that can provide summarized representations of vessel trajectories by consuming AIS positional messages online. This methodology can provide reliable trajectory synopses with little deviations from the original course by discarding at least 70% of the raw data as redundant. However, such trajectory compression is very sensitive to parametrization. In this paper, our goal is to fine-tune the selection of these parameter values. We take into account the type of each vessel in order to provide a suitable configuration that can yield improved trajectory synopses, both in terms of approximation error and compression ratio. Furthermore, we employ a genetic algorithm converging to a suitable configuration per vessel type. Our tests against a publicly available AIS dataset have shown that compression efficiency is comparable or even better than the one with default parametrization without resorting to a laborious data inspection.
Online Event Recognition from Moving Vessel Trajectories
Jan 22, 2016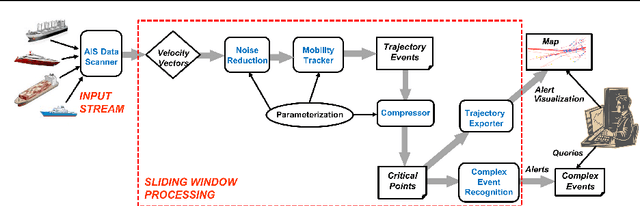

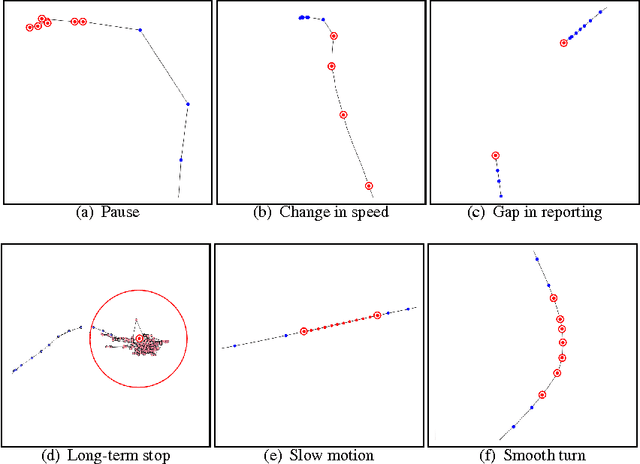
We present a system for online monitoring of maritime activity over streaming positions from numerous vessels sailing at sea. It employs an online tracking module for detecting important changes in the evolving trajectory of each vessel across time, and thus can incrementally retain concise, yet reliable summaries of its recent movement. In addition, thanks to its complex event recognition module, this system can also offer instant notification to marine authorities regarding emergency situations, such as risk of collisions, suspicious moves in protected zones, or package picking at open sea. Not only did our extensive tests validate the performance, efficiency, and robustness of the system against scalable volumes of real-world and synthetically enlarged datasets, but its deployment against online feeds from vessels has also confirmed its capabilities for effective, real-time maritime surveillance.