 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentic Search Engine for Real-Time IoT Data
Mar 15, 2025The Internet of Things (IoT) has enabled diverse devices to communicate over the Internet, yet the fragmentation of IoT systems limits seamless data sharing and coordinated management. We have recently introduced SensorsConnect, a unified framework to enable seamless content and sensor data sharing in collaborative IoT systems, inspired by how the World Wide Web (WWW) enabled a shared and accessible space for information among humans. This paper presents the IoT Agentic Search Engine (IoT-ASE), a real-time search engine tailored for IoT environments. IoT-ASE leverages Large Language Models (LLMs) and Retrieval Augmented Generation (RAG) techniques to address the challenge of searching vast, real-time IoT data, enabling it to handle complex queries and deliver accurate, contextually relevant results. We implemented a use-case scenario in Toronto to demonstrate how IoT-ASE can improve service quality recommendations by leveraging real-time IoT data. Our evaluation shows that IoT-ASE achieves a 92\% accuracy in retrieving intent-based services and produces responses that are concise, relevant, and context-aware, outperforming generalized responses from systems like Gemini. These findings highlight the potential IoT-ASE to make real-time IoT data accessible and support effective, real-time decision-making.
Leveraging Self-Training and Variational Autoencoder for Agitation Detection in People with Dementia Using Wearable Sensors
Dec 26, 2024Dementia is a neurodegenerative disorder that has been growing among elder people over the past decades. This growth profoundly impacts the quality of life for patients and caregivers due to the symptoms arising from it. Agitation and aggression (AA) are some of the symptoms of people with severe dementia (PwD) in long-term care or hospitals. AA not only causes discomfort but also puts the patients or others at potential risk. Existing monitoring solutions utilizing different wearable sensors integrated with Artificial Intelligence (AI) offer a way to detect AA early enough for timely and adequate medical intervention. However, most studies are limited by the availability of accurately labeled datasets, which significantly affects the efficacy of such solutions in real-world scenarios. This study presents a novel comprehensive approach to detect AA in PwD using physiological data from the Empatica E4 wristbands. The research creates a diverse dataset, consisting of three distinct datasets gathered from 14 participants across multiple hospitals in Canada. These datasets have not been extensively explored due to their limited labeling. We propose a novel approach employing self-training and a variational autoencoder (VAE) to detect AA in PwD effectively. The proposed approach aims to learn the representation of the features extracted using the VAE and then uses a semi-supervised block to generate labels, classify events, and detect AA. We demonstrate that combining Self-Training and Variational Autoencoder mechanism significantly improves model performance in classifying AA in PwD. Among the tested techniques, the XGBoost classifier achieved the highest accuracy of 90.16\%. By effectively addressing the challenge of limited labeled data, the proposed system not only learns new labels but also proves its superiority in detecting AA.
Quality-Aware Task Offloading for Cooperative Perception in Vehicular Edge Computing
May 31, 2024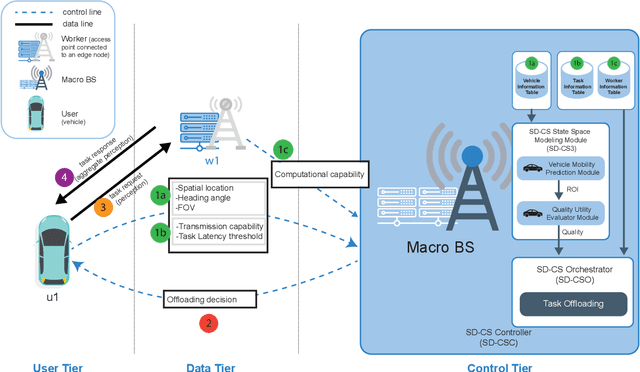
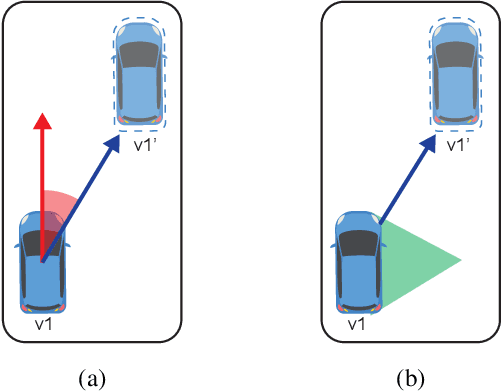
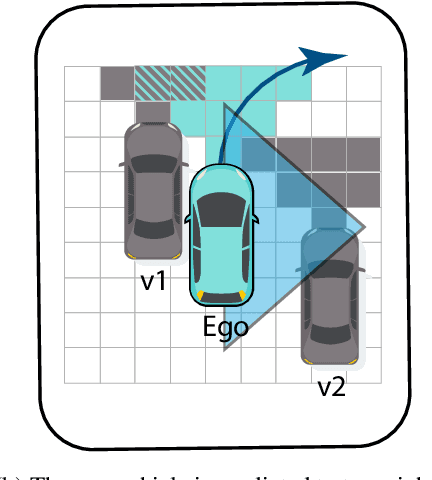
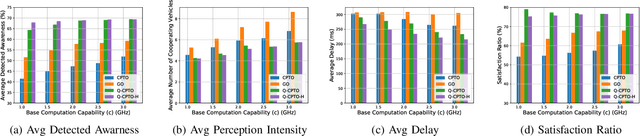
Task offloading in Vehicular Edge Computing (VEC) can advance cooperative perception (CP) to improve traffic awareness in Autonomous Vehicles. In this paper, we propose the Quality-aware Cooperative Perception Task Offloading (QCPTO) scheme. Q-CPTO is the first task offloading scheme that enhances traffic awareness by prioritizing the quality rather than the quantity of cooperative perception. Q-CPTO improves the quality of CP by curtailing perception redundancy and increasing the Value of Information (VOI) procured by each user. We use Kalman filters (KFs) for VOI assessment, predicting the next movement of each vehicle to estimate its region of interest. The estimated VOI is then integrated into the task offloading problem. We formulate the task offloading problem as an Integer Linear Program (ILP) that maximizes the VOI of users and reduces perception redundancy by leveraging the spatially diverse fields of view (FOVs) of vehicles, while adhering to strict latency requirements. We also propose the Q-CPTO-Heuristic (Q-CPTOH) scheme to solve the task offloading problem in a time-efficient manner. Extensive evaluations show that Q-CPTO significantly outperforms prominent task offloading schemes by up to 14% and 20% in terms of response delay and traffic awareness, respectively. Furthermore, Q-CPTO-H closely approaches the optimal solution, with marginal gaps of up to 1.4% and 2.1% in terms of traffic awareness and the number of collaborating users, respectively, while reducing the runtime by up to 84%.