 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProof-of-concept Study of Sparse Processing Particle Image Velocimetry for Real Time Flow Observation
Jul 19, 2022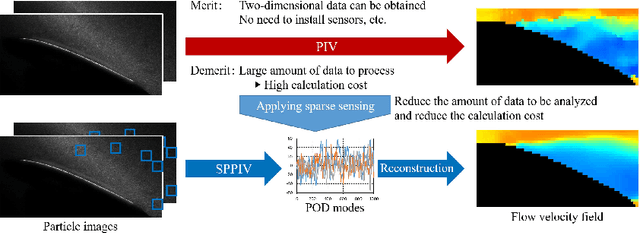
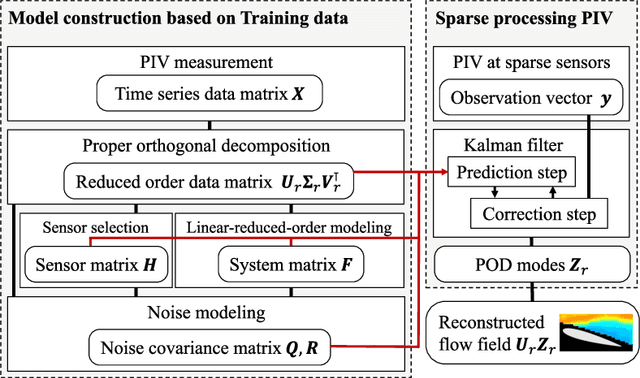
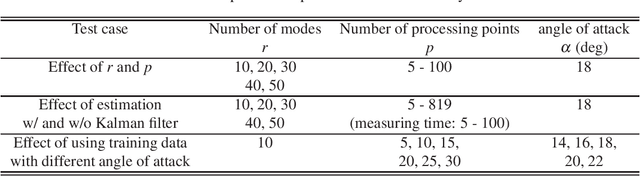
In this paper, we overview, evaluate, and demonstrate the sparse processing particle image velocimetry (SPPIV) as a real-time flow field estimation method using the particle image velocimetry (PIV), whereas SPPIV was previously proposed with its feasibility study and its real-time demonstration is conducted for the first time in this study. In the wind tunnel test, the PIV measurement and real-time measurement using SPPIV were conducted for the flow velocity field around the NACA0015 airfoil model. The off-line analysis results of the test show that the flow velocity field can be estimated from a small number of processing points by applying SPPIV, and also illustrates the following characteristics of SPPIV. The estimation accuracy improves as the number of processing points increases, whereas the processing time per step increases in proportion to the number of processing points. Therefore, it is necessary to set an optimal number of processing points. In addition, the application of the Kalman filter significantly improves the estimation accuracy with a small number of processing points while suppressing the processing time. When the flow velocity fields with different angles of attack are used as the training data with that of test data, the estimation using SPPIV is found to be reasonable if the difference in angle of attack between the training and test data is equal to or less than 2 deg and the flow phenomena of the training data are similar to that of the test data. For this reason, training data should be prepared at least every 4 deg. Finally, the demonstration of SPPIV as a real-time flow observation was conducted for the first time. In this demonstration, the real-time measurement is found to be possible at a sampling rate of 2000 Hz at 20 or less processing points in the top 10 modes estimation as expected by the off-line analyses.
Greedy Sensor Placement for Weighted Linear-Least Squares Estimation under Correlated Noise
Apr 27, 2021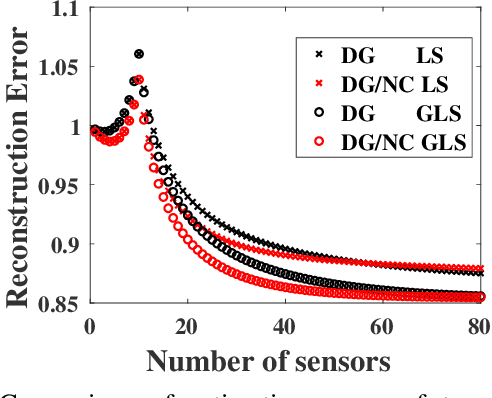
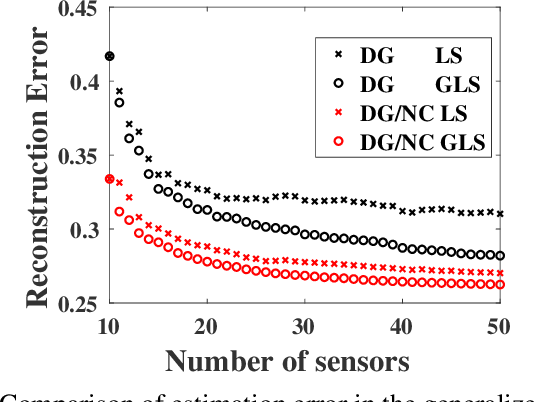
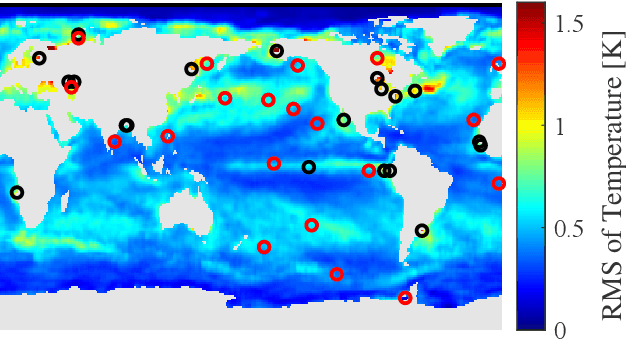
Optimization for sensor placement has been intensely studied to monitor complex, large scale systems, whereas one needs to overcome its intractable nature of the objective function for the optimization. In this study, a fast algorithm for greedy sensor selection is presented for a linear reduced-ordered reconstruction under the assumption of correlated noise on the sensor signals. The presented algorithm accomplishes the maximization of the determinant of the Fisher information matrix in the linear inverse problem, while this study firstly shows that the objective function with correlated noise is neither submodular nor supermodular. Efficient one-rank computations in the greedy selection procedure are introduced in both of the underdetermined and oversampled problem. Several numerical experiments show the effectiveness of the selection algorithm for its accuracy in the estimation of the states of large dimensional measurement data.