 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Avoidance of 3-Dimensional Objects in Dynamic Environments
Mar 17, 2022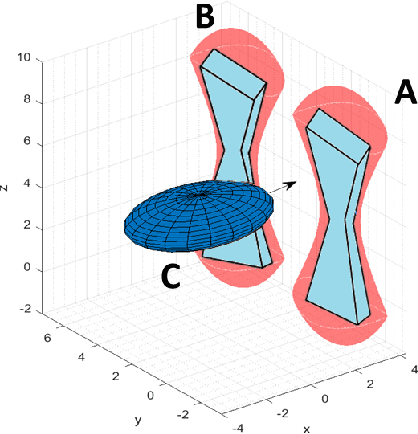
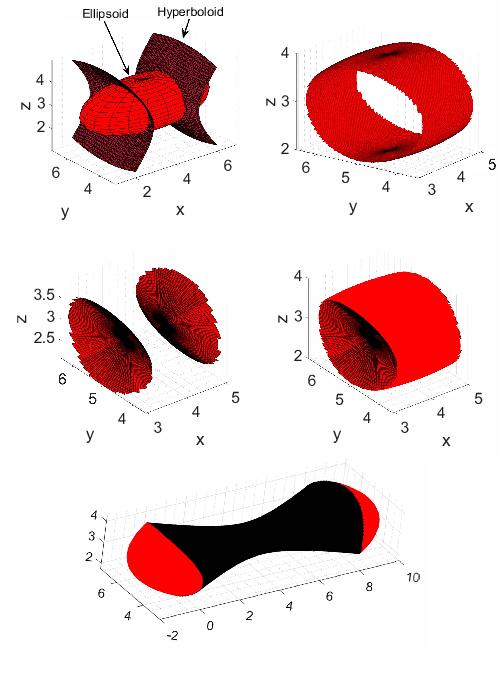
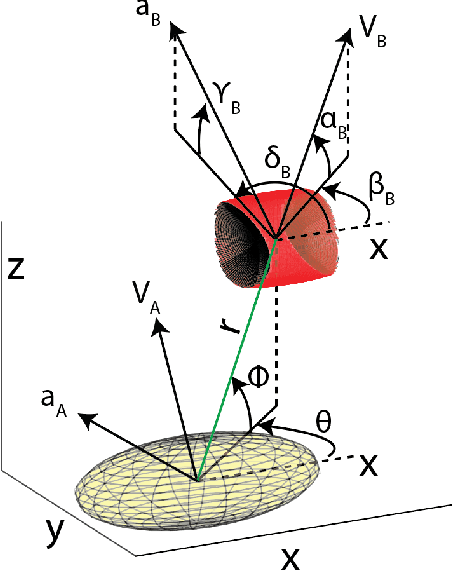
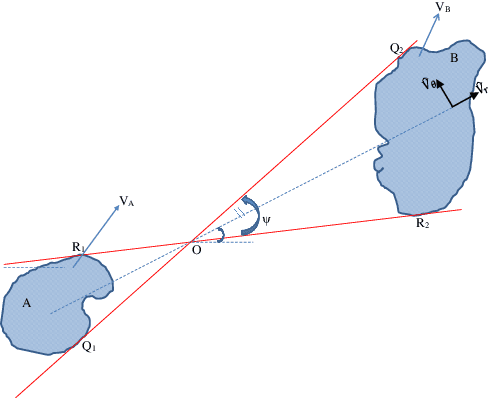
Achieving collision avoidance between moving objects is an important objective while determining robot trajectories. In performing collision avoidance maneuvers, the relative shapes of the objects play an important role. The literature largely models the shapes of the objects as spheres, and this can make the avoidance maneuvers very conservative, especially when the objects are of elongated shape and/or non-convex. In this paper, we model the shapes of the objects using suitable combinations of ellipsoids and one-sheeted/two-sheeted hyperboloids, and employ a collision cone approach to achieve collision avoidance. We present a method to construct the 3-D collision cone, and present simulation results demonstrating the working of the collision avoidance laws.
Vision-Based Guidance for Tracking Dynamic Objects
May 15, 2021



In this paper, we present a novel vision-based framework for tracking dynamic objects using guidance laws based on a rendezvous cone approach. These guidance laws enable an unmanned aircraft system equipped with a monocular camera to continuously follow a moving object within the sensor's field of view. We identify and classify feature point estimators for managing the occurrence of occlusions during the tracking process in an exclusive manner. Furthermore, we develop an open-source simulation environment and perform a series of simulations to show the efficacy of our methods.