 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Commands to Goal-based Dialogs: A Roadmap to Achieve Natural Language Interaction in RoboCup@Home
Feb 02, 2019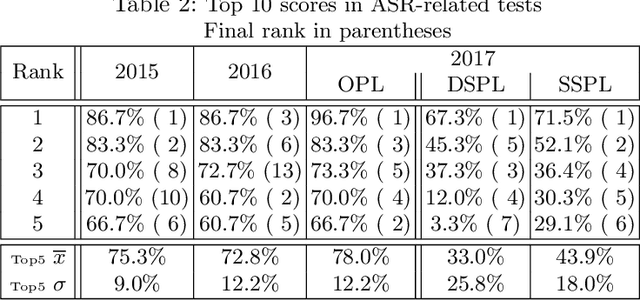
On the one hand, speech is a key aspect to people's communication. On the other, it is widely acknowledged that language proficiency is related to intelligence. Therefore, intelligent robots should be able to understand, at least, people's orders within their application domain. These insights are not new in RoboCup@Home, but we lack of a long-term plan to evaluate this approach. In this paper we conduct a brief review of the achievements on automated speech recognition and natural language understanding in RoboCup@Home. Furthermore, we discuss main challenges to tackle in spoken human-robot interaction within the scope of this competition. Finally, we contribute by presenting a pipelined road map to engender research in the area of natural language understanding applied to domestic service robotics.
Default Handling in Incremental Generation
Oct 30, 1994Natural language generation must work with insufficient input. Underspecifications can be caused by shortcomings of the component providing the input or by the preliminary state of incrementally given input. The paper aims to escape from such dead-end situations by making assumptions. We discuss global aspects of default handling. Two problem classes for defaults in the incremental syntactic generator VM-GEN are presented to substantiate our discussion.