 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKANDU-Net:A Dual-Channel U-Net with KAN for Medical Image Segmentation
Sep 30, 2024The U-Net model has consistently demonstrated strong performance in the field of medical image segmentation, with various improvements and enhancements made since its introduction. This paper presents a novel architecture that integrates KAN networks with U-Net, leveraging the powerful nonlinear representation capabilities of KAN networks alongside the established strengths of U-Net. We introduce a KAN-convolution dual-channel structure that enables the model to more effectively capture both local and global features. We explore effective methods for fusing features extracted by KAN with those obtained through convolutional layers, utilizing an auxiliary network to facilitate this integration process. Experiments conducted across multiple datasets show that our model performs well in terms of accuracy, indicating that the KAN-convolution dual-channel approach has significant potential in medical image segmentation tasks.
Medical Image Segmentation via Sparse Coding Decoder
Oct 17, 2023


Transformers have achieved significant success in medical image segmentation, owing to its capability to capture long-range dependencies. Previous works incorporate convolutional layers into the encoder module of transformers, thereby enhancing their ability to learn local relationships among pixels. However, transformers may suffer from limited generalization capabilities and reduced robustness, attributed to the insufficient spatial recovery ability of their decoders. To address this issue, A convolution sparse vector coding based decoder is proposed , namely CAScaded multi-layer Convolutional Sparse vector Coding DEcoder (CASCSCDE), which represents features extracted by the encoder using sparse vectors. To prove the effectiveness of our CASCSCDE, The widely-used TransUNet model is chosen for the demonstration purpose, and the CASCSCDE is incorporated with TransUNet to establish the TransCASCSCDE architecture. Our experiments demonstrate that TransUNet with CASCSCDE significantly enhances performance on the Synapse benchmark, obtaining up to 3.15\% and 1.16\% improvements in DICE and mIoU scores, respectively. CASCSCDE opens new ways for constructing decoders based on convolutional sparse vector coding.
A further exploration of deep Multi-Agent Reinforcement Learning with Hybrid Action Space
Aug 30, 2022



The research of extending deep reinforcement learning (drl) to multi-agent field has solved many complicated problems and made great achievements. However, almost all these studies only focus on discrete or continuous action space and there are few works having ever used multi-agent deep reinforcement learning to real-world environment problems which mostly have a hybrid action space. Therefore, in this paper, we propose two algorithms: deep multi-agent hybrid soft actor-critic (MAHSAC) and multi-agent hybrid deep deterministic policy gradients (MAHDDPG) to fill this gap. This two algorithms follow the centralized training and decentralized execution (CTDE) paradigm and could handle hybrid action space problems. Our experiences are running on multi-agent particle environment which is an easy multi-agent particle world, along with some basic simulated physics. The experimental results show that these algorithms have good performances.
Deep Multi-Agent Reinforcement Learning with Hybrid Action Spaces based on Maximum Entropy
Jun 10, 2022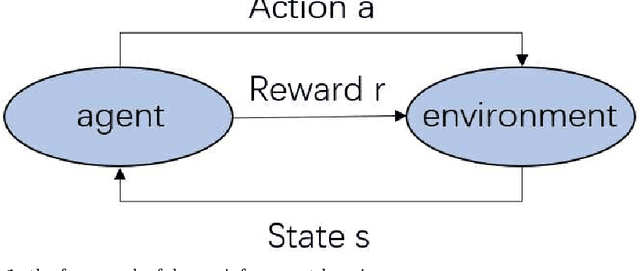

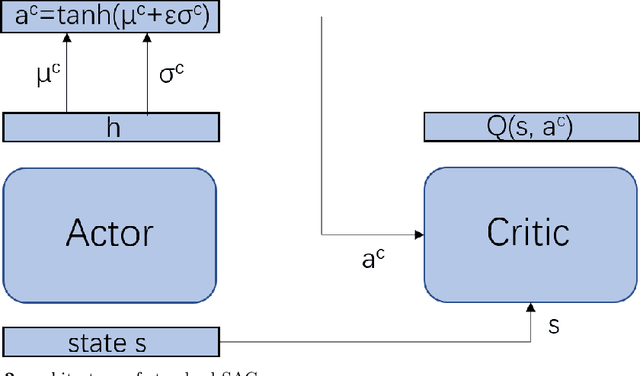
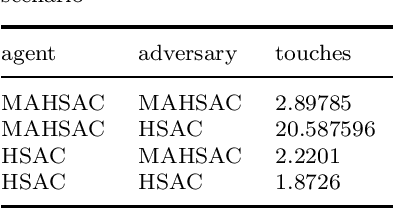
Multi-agent deep reinforcement learning has been applied to address a variety of complex problems with either discrete or continuous action spaces and achieved great success. However, most real-world environments cannot be described by only discrete action spaces or only continuous action spaces. And there are few works having ever utilized deep reinforcement learning (drl) to multi-agent problems with hybrid action spaces. Therefore, we propose a novel algorithm: Deep Multi-Agent Hybrid Soft Actor-Critic (MAHSAC) to fill this gap. This algorithm follows the centralized training but decentralized execution (CTDE) paradigm, and extend the Soft Actor-Critic algorithm (SAC) to handle hybrid action space problems in Multi-Agent environments based on maximum entropy. Our experiences are running on an easy multi-agent particle world with a continuous observation and discrete action space, along with some basic simulated physics. The experimental results show that MAHSAC has good performance in training speed, stability, and anti-interference ability. At the same time, it outperforms existing independent deep hybrid learning method in cooperative scenarios and competitive scenarios.
Building Decision Forest via Deep Reinforcement Learning
Apr 01, 2022



Ensemble learning methods whose base classifier is a decision tree usually belong to the bagging or boosting. However, no previous work has ever built the ensemble classifier by maximizing long-term returns to the best of our knowledge. This paper proposes a decision forest building method called MA-H-SAC-DF for binary classification via deep reinforcement learning. First, the building process is modeled as a decentralized partial observable Markov decision process, and a set of cooperative agents jointly constructs all base classifiers. Second, the global state and local observations are defined based on informations of the parent node and the current location. Last, the state-of-the-art deep reinforcement method Hybrid SAC is extended to a multi-agent system under the CTDE architecture to find an optimal decision forest building policy. The experiments indicate that MA-H-SAC-DF has the same performance as random forest, Adaboost, and GBDT on balanced datasets and outperforms them on imbalanced datasets.
Cooperative Pathfinding based on high-scalability Multi-agent RRT*
Nov 16, 2019
Problems that claim several agents to find no-conflicts paths from their start locations to their destinations are named as cooperative pathfinding problems. This problem can be efficiently solved by the Multi-agent RRT*(MA-RRT*) algorithm, which offers better scalability than some traditional algorithms, such as Optimal Anytime(OA), in sparse environments. However, MA-RRT* cannot effectively find solutions in relatively dense environments, cause some random samples in the free space cannot be explored by the rapidly random tree, which hinders the application of MA-RRT* in a more complicated real-world. This paper proposes an improved version of MA-RRT *, called Multi-agent RRT* Potential Field (MA-RRT*PF), an anytime algorithm that can efficiently guide the rapidly random tree to the free space in relatively dense environments. It works by incorporating a potential field to the GREEDY function to enhance the ability to avoid the obstacles. The results show that MA-RRT*PF performs much better than MA-RRT* in relatively dense environments in terms of scalability while still maintaining the solution quality.
Cooperative Pathfinding based on memory-efficient Multi-agent RRT*
Nov 16, 2019



In cooperative pathfinding problems, no-conflicts paths that bring several agents from their start location to their destination need to be planned. This problem can be efficiently solved by Multi-agent RRT*(MA-RRT*) algorithm, which offers better scalability than the classical algorithms, such as Optimal Anytime(OA), in sparse environments. However, the implementation of this algorithm in systems with limited memory is hindered because the number of nodes in the tree grows indefinitely as the paths get optimized. This paper proposes an improved version of MA-RRT*, called Multi-agent RRT* Fixed Node(MA-RRT*FN), which limits the number of nodes stored in the tree by removing the weak nodes which are not likely on the path reaching the goal. The results show that MA-RRT*FN performs close to MA-RRT* in terms of scalability and solution quality while the memory required is much lower and fixed.