 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereo Event-based Visual-Inertial Odometry
Mar 16, 2023
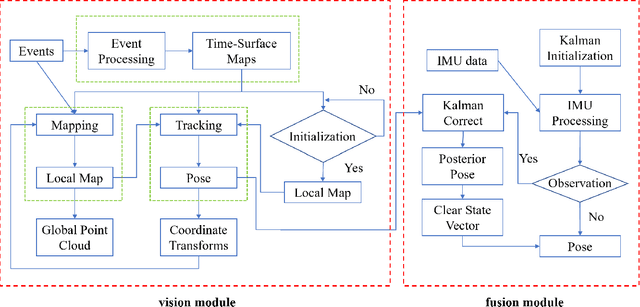
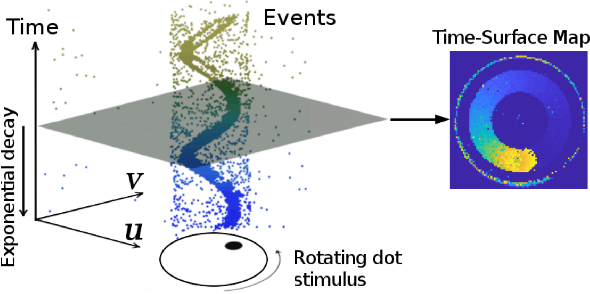
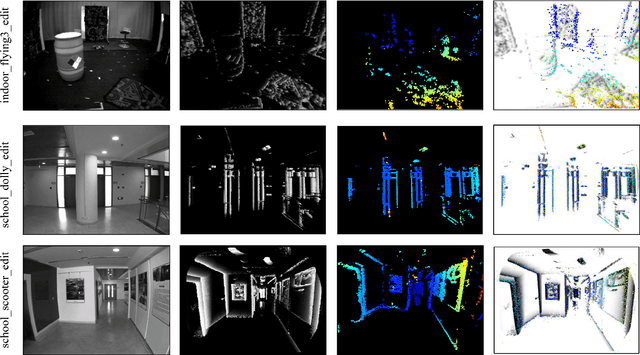
Event-based cameras are new type vision sensors whose pixels work independently and respond asynchronously to brightness change with microsecond resolution, instead of provide stand-ard intensity frames. Compared with traditional cameras, event-based cameras have low latency, no motion blur, and high dynamic range (HDR), which provide possibilities for robots to deal with some challenging scenes. We propose a visual-inertial odometry method for stereo event-cameras based on Kalman filtering. The visual module updates the camera pose relies on the edge alignment of a semi-dense 3D map to a 2D image, and the IMU module updates pose by midpoint method. We evaluate our method on public datasets in natural scenes with general 6-DoF motion and compare the results against ground truth. We show that the proposed pipeline provides improved accuracy over the result of a state-of-the-art visual odometry method for stereo event-cameras, while running in real-time on a standard CPU. To the best of our knowledge, this is the first published visual-inertial odometry algorithm for stereo event-cameras.