 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-modal Motion Prediction using Temporal Ensembling with Learning-based Aggregation
Oct 25, 2024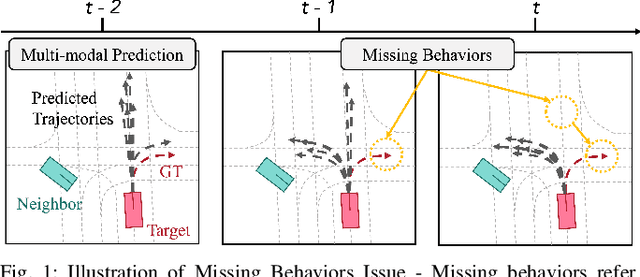
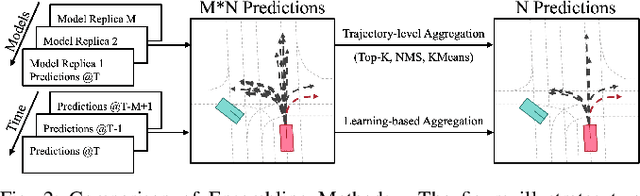
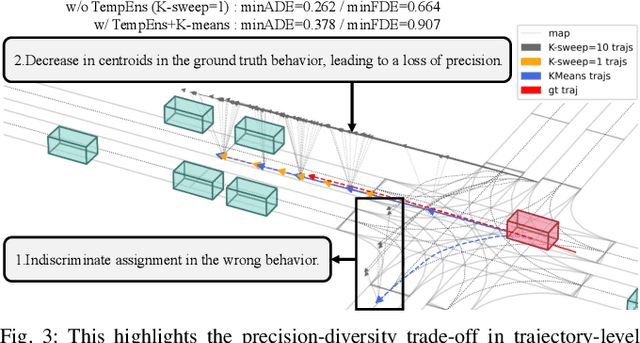
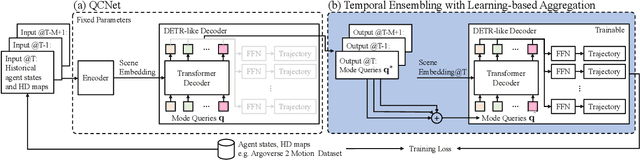
Recent years have seen a shift towards learning-based methods for trajectory prediction, with challenges remaining in addressing uncertainty and capturing multi-modal distributions. This paper introduces Temporal Ensembling with Learning-based Aggregation, a meta-algorithm designed to mitigate the issue of missing behaviors in trajectory prediction, which leads to inconsistent predictions across consecutive frames. Unlike conventional model ensembling, temporal ensembling leverages predictions from nearby frames to enhance spatial coverage and prediction diversity. By confirming predictions from multiple frames, temporal ensembling compensates for occasional errors in individual frame predictions. Furthermore, trajectory-level aggregation, often utilized in model ensembling, is insufficient for temporal ensembling due to a lack of consideration of traffic context and its tendency to assign candidate trajectories with incorrect driving behaviors to final predictions. We further emphasize the necessity of learning-based aggregation by utilizing mode queries within a DETR-like architecture for our temporal ensembling, leveraging the characteristics of predictions from nearby frames. Our method, validated on the Argoverse 2 dataset, shows notable improvements: a 4% reduction in minADE, a 5% decrease in minFDE, and a 1.16% reduction in the miss rate compared to the strongest baseline, QCNet, highlighting its efficacy and potential in autonomous driving.