 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network Verification with PyRAT
Oct 31, 2024As AI systems are becoming more and more popular and used in various critical domains (health, transport, energy, ...), the need to provide guarantees and trust of their safety is undeniable. To this end, we present PyRAT, a tool based on abstract interpretation to verify the safety and the robustness of neural networks. In this paper, we describe the different abstractions used by PyRAT to find the reachable states of a neural network starting from its input as well as the main features of the tool to provide fast and accurate analysis of neural networks. PyRAT has already been used in several collaborations to ensure safety guarantees, with its second place at the VNN-Comp 2024 showcasing its performance.
Analysis of a Target-Based Actor-Critic Algorithm with Linear Function Approximation
Jun 14, 2021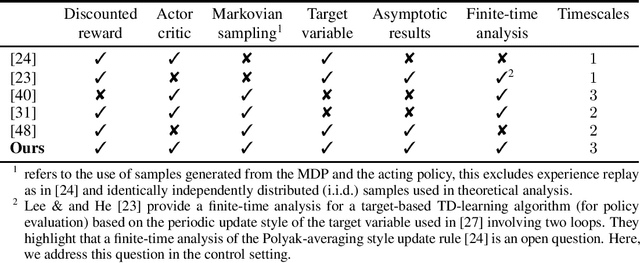
Actor-critic methods integrating target networks have exhibited a stupendous empirical success in deep reinforcement learning. However, a theoretical understanding of the use of target networks in actor-critic methods is largely missing in the literature. In this paper, we bridge this gap between theory and practice by proposing the first theoretical analysis of an online target-based actor-critic algorithm with linear function approximation in the discounted reward setting. Our algorithm uses three different timescales: one for the actor and two for the critic. Instead of using the standard single timescale temporal difference (TD) learning algorithm as a critic, we use a two timescales target-based version of TD learning closely inspired from practical actor-critic algorithms implementing target networks. First, we establish asymptotic convergence results for both the critic and the actor under Markovian sampling. Then, we provide a finite-time analysis showing the impact of incorporating a target network into actor-critic methods.