 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLand Cover Image Classification
Jan 17, 2024Land Cover (LC) image classification has become increasingly significant in understanding environmental changes, urban planning, and disaster management. However, traditional LC methods are often labor-intensive and prone to human error. This paper explores state-of-the-art deep learning models for enhanced accuracy and efficiency in LC analysis. We compare convolutional neural networks (CNN) against transformer-based methods, showcasing their applications and advantages in LC studies. We used EuroSAT, a patch-based LC classification data set based on Sentinel-2 satellite images and achieved state-of-the-art results using current transformer models.
Loss Functions and Metrics in Deep Learning. A Review
Jul 05, 2023One of the essential components of deep learning is the choice of the loss function and performance metrics used to train and evaluate models. This paper reviews the most prevalent loss functions and performance measurements in deep learning. We examine the benefits and limits of each technique and illustrate their application to various deep-learning problems. Our review aims to give a comprehensive picture of the different loss functions and performance indicators used in the most common deep learning tasks and help practitioners choose the best method for their specific task.
A Comprehensive Review of YOLO: From YOLOv1 to YOLOv8 and Beyond
Apr 02, 2023



YOLO has become a central real-time object detection system for robotics, driverless cars, and video monitoring applications. We present a comprehensive analysis of YOLO's evolution, examining the innovations and contributions in each iteration from the original YOLO to YOLOv8. We start by describing the standard metrics and postprocessing; then, we discuss the major changes in network architecture and training tricks for each model. Finally, we summarize the essential lessons from YOLO's development and provide a perspective on its future, highlighting potential research directions to enhance real-time object detection systems.
Telepresence System based on Simulated Holographic Display
Apr 06, 2018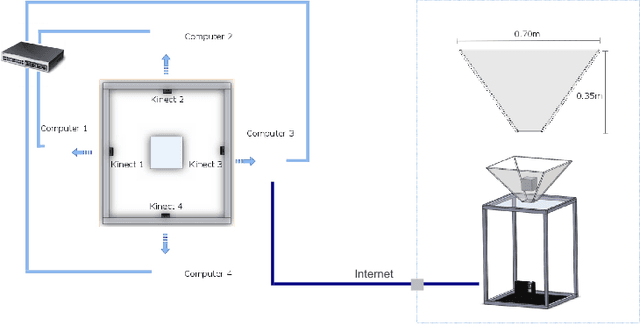


We present a telepresence system based on a custom-made simulated holographic display that produces a full 3D model of the remote participants using commodity depth sensors. Our display is composed of a video projector and a quadrangular pyramid made of acrylic, that allows the user to experience an omnidirectional visualization of a remote person without the need for head-mounted displays. To obtain a precise representation of the participants, we fuse together multiple views extracted using a deep background subtraction method. Our system represents an attempt to democratize high-fidelity 3D telepresence using off-the-shelf components.