 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Image-Based Sensor System for Autonomous Rendez-Vous with Uncooperative Satellites
Jul 28, 2008


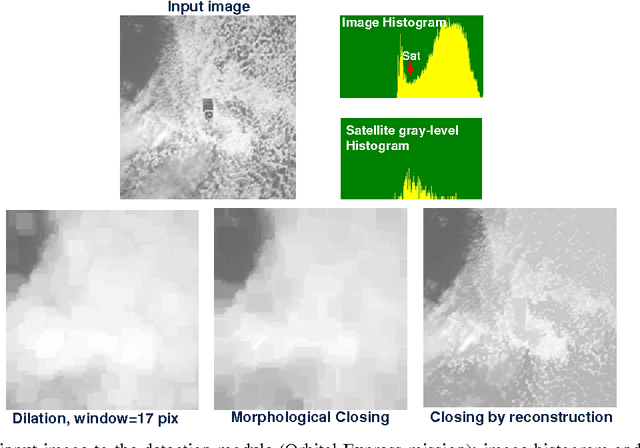
In this paper are described the image processing algorithms developed by SENER, Ingenieria y Sistemas to cope with the problem of image-based, autonomous rendez-vous (RV) with an orbiting satellite. The methods developed have a direct application in the OLEV (Orbital Life Extension Extension Vehicle) mission. OLEV is a commercial mission under development by a consortium formed by Swedish Space Corporation, Kayser-Threde and SENER, aimed to extend the operational life of geostationary telecommunication satellites by supplying them control, navigation and guidance services. OLEV is planned to use a set of cameras to determine the angular position and distance to the client satellite during the complete phases of rendez-vous and docking, thus enabling the operation with satellites not equipped with any specific navigational aid to provide support during the approach. The ability to operate with un-equipped client satellites significantly expands the range of applicability of the system under development, compared to other competing video technologies already tested in previous spatial missions, such as the ones described here below.