Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrackNet: A Triplet metric-based method for Multi-Target Multi-Camera Vehicle Tracking
May 27, 2022
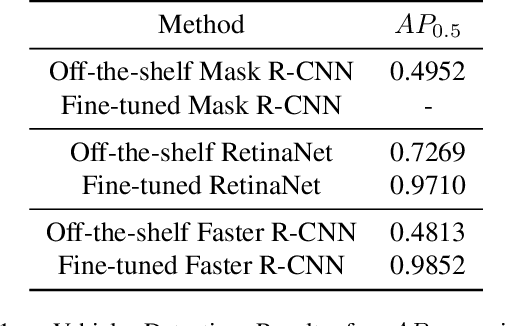
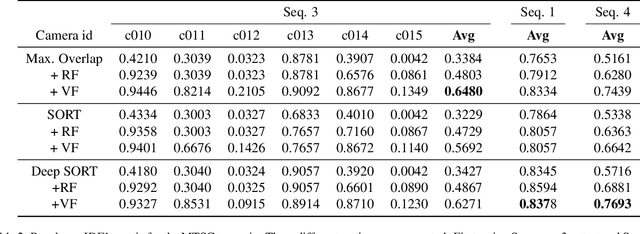

We present TrackNet, a method for Multi-Target Multi-Camera (MTMC) vehicle tracking from traffic video sequences. Cross-camera vehicle tracking has proved to be a challenging task due to perspective, scale and speed variance, as well occlusions and noise conditions. Our method is based on a modular approach that first detects vehicles frame-by-frame using Faster R-CNN, then tracks detections through single camera using Kalman filter, and finally matches tracks by a triplet metric learning strategy. We conduct experiments on TrackNet within the AI City Challenge framework, and present competitive IDF1 results of 0.4733.
* 4 pages, 2 figures
Via