 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-decentralized Inference in Heterogeneous Graph Neural Networks for Traffic Demand Forecasting: An Edge-Computing Approach
Feb 28, 2023Accurate and timely prediction of transportation demand and supply is essential for improving customer experience and raising the provider's profit. Recently, graph neural networks (GNNs) have been shown promising in predicting traffic demand and supply in small city regions. This awes their capability in modeling both a node's historical features and its relational information with other nodes. However, more efficient taxi demand and supply forecasting can still be achieved by following two main routes. First, is extending the scale of the prediction graph to include more regions. Second, is the simultaneous exploitation of multiple node and edge types to better expose and exploit the complex and diverse set of relations in a traffic system. Nevertheless, the applicability of both approaches is challenged by the scalability of system-wide GNN training and inference. An immediate remedy to the scalability challenge is to decentralize the GNN operation. However, decentralizing GNN operation creates excessive node-to-node communication overhead which hinders the potential of this approach. In this paper, we propose a semi-decentralized approach based on the use of multiple, moderately sized, and high-throughout cloudlet communication networks on the edge. This approach combines the best features of the centralized and decentralized settings; it may minimize the inter-cloudlet communication thereby alleviating the communication overhead of the decentralized approach while promoting scalability due to cloudlet-level decentralization. Also, we propose a heterogeneous GNN-LSTM algorithm for improved taxi-level demand and supply forecasting. This approach allows for handling dynamic taxi graphs where nodes are taxis. Through a set of experiments over real data, we show the advantage of the semi-decentralized approach as tested over our GNN-LSTM algorithm for taxi demand and supply prediction.
Development of a CAV-based Intersection Control System and Corridor Level Impact Assessment
Aug 21, 2022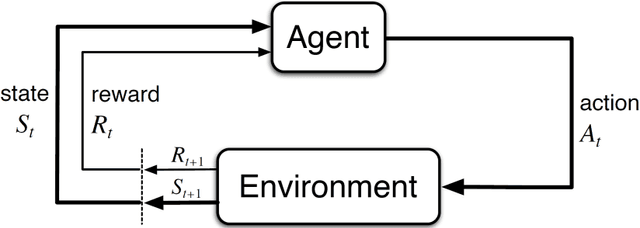
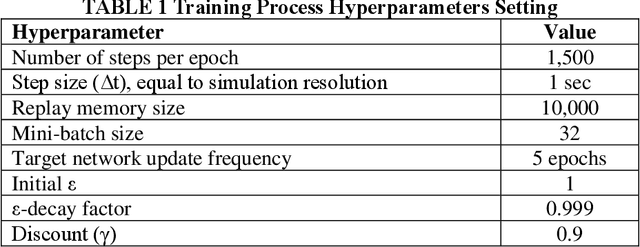
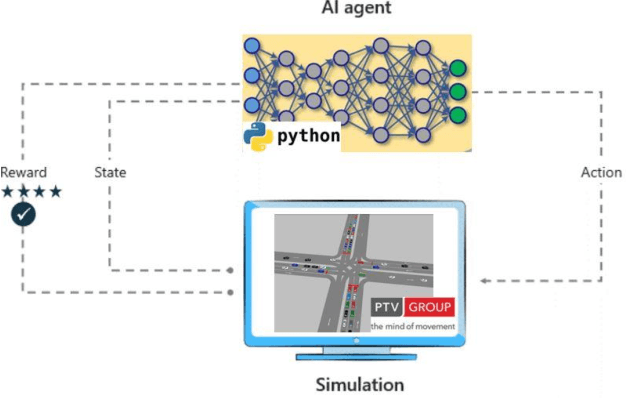
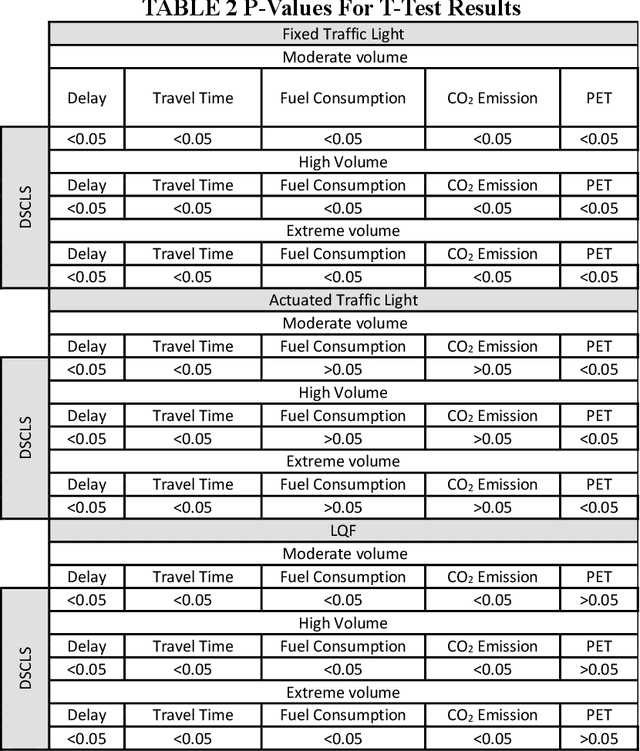
This paper presents a signal-free intersection control system for CAVs by combination of a pixel reservation algorithm and a Deep Reinforcement Learning (DRL) decision-making logic, followed by a corridor-level impact assessment of the proposed model. The pixel reservation algorithm detects potential colliding maneuvers and the DRL logic optimizes vehicles' movements to avoid collision and minimize the overall delay at the intersection. The proposed control system is called Decentralized Sparse Coordination System (DSCLS) since each vehicle has its own control logic and interacts with other vehicles in coordinated states only. Due to the chain impact of taking random actions in the DRL's training course, the trained model can deal with unprecedented volume conditions, which poses the main challenge in intersection management. The performance of the developed model is compared with conventional and CAV-based control systems, including fixed traffic lights, actuated traffic lights, and the Longest Queue First (LQF) control system under three volume regimes in a corridor of four intersections in VISSIM software. The simulation result revealed that the proposed model reduces delay by 50%, 29%, and 23% in moderate, high, and extreme volume regimes compared to the other CAV-based control system. Improvements in travel time, fuel consumption, emission, and Surrogate Safety Measures (SSM) are also noticeable.