 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Effect of Tail Stiffness on a Sprawling Quadruped Locomotion
Apr 09, 2023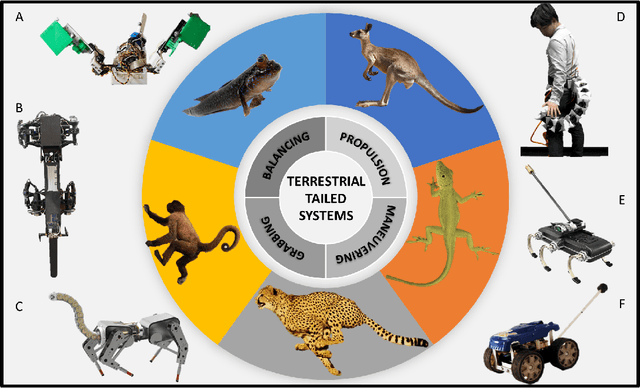
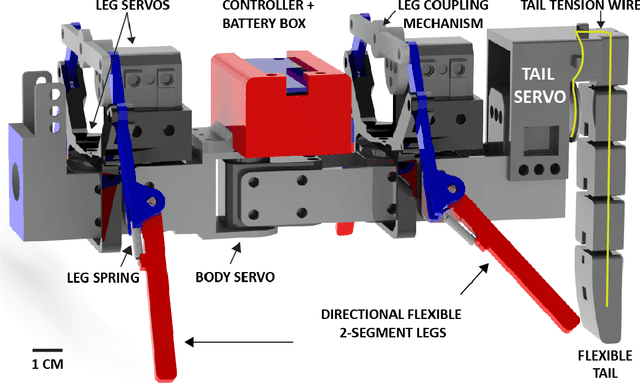
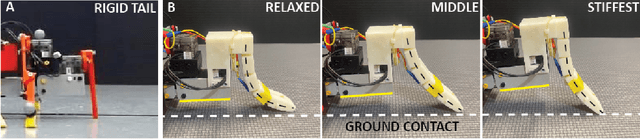
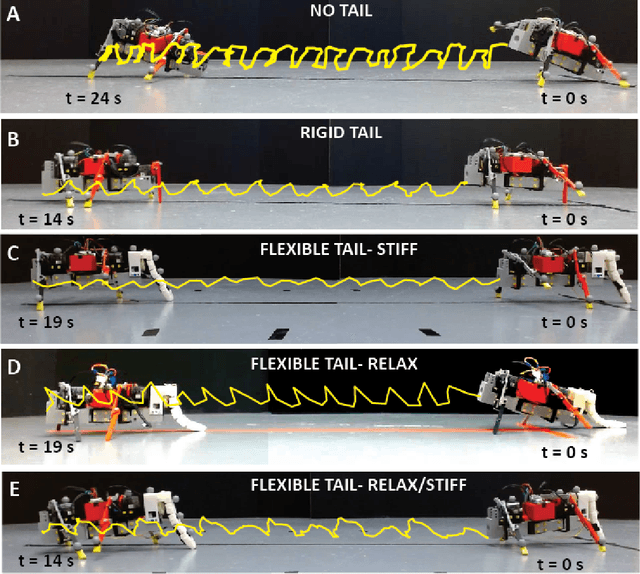
A distinctive feature of quadrupeds that is integral to their locomotion is the tail. Tails serve many purposes in biological systems including propulsion, counterbalance, and stabilization while walking, running, climbing, or jumping. Similarly, tails in legged robots may augment the stability and maneuverability of legged robots by providing an additional point of contact with the ground. However, in the field of terrestrial bio-inspired legged robotics, the tail is often ignored because of the difficulties in design and control. This study will test the hypothesis that a variable stiffness robotic tail can improve the performance of a sprawling quadruped robot by enhancing its stability and maneuverability in various environments. To test our hypothesis, we add a multi-segment, cable-driven, flexible tail, whose stiffness is controlled by a single servo motor in conjunction with a reel and cable system, to the underactuated sprawling quadruped robot. By controlling the stiffness of the tail, we have shown that the stability of locomotion on rough terrain and the climbing ability of the robot are improved compared to the movement with a rigid tail and no tail. The flexible tail design also provides passively controlled tail undulation capabilities through the robot's lateral movement, which contributes to stability.