 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUMERegRobust - Universal Manifold Embedding Compatible Features for Robust Point Cloud Registration
Aug 23, 2024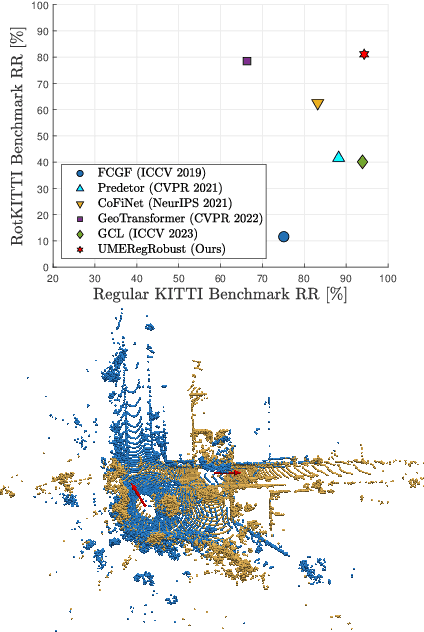

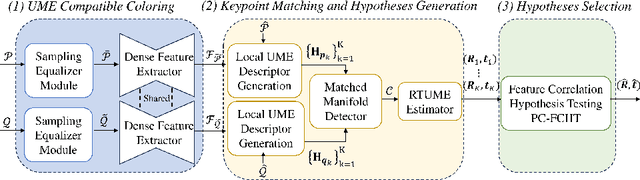

In this paper, we adopt the Universal Manifold Embedding (UME) framework for the estimation of rigid transformations and extend it, so that it can accommodate scenarios involving partial overlap and differently sampled point clouds. UME is a methodology designed for mapping observations of the same object, related by rigid transformations, into a single low-dimensional linear subspace. This process yields a transformation-invariant representation of the observations, with its matrix form representation being covariant (i.e. equivariant) with the transformation. We extend the UME framework by introducing a UME-compatible feature extraction method augmented with a unique UME contrastive loss and a sampling equalizer. These components are integrated into a comprehensive and robust registration pipeline, named UMERegRobust. We propose the RotKITTI registration benchmark, specifically tailored to evaluate registration methods for scenarios involving large rotations. UMERegRobust achieves better than state-of-the-art performance on the KITTI benchmark, especially when strict precision of (1{\deg}, 10cm) is considered (with an average gain of +9%), and notably outperform SOTA methods on the RotKITTI benchmark (with +45% gain compared the most recent SOTA method).
DeepUME: Learning the Universal Manifold Embedding for Robust Point Cloud Registration
Dec 18, 2021



Registration of point clouds related by rigid transformations is one of the fundamental problems in computer vision. However, a solution to the practical scenario of aligning sparsely and differently sampled observations in the presence of noise is still lacking. We approach registration in this scenario with a fusion of the closed-form Universal Mani-fold Embedding (UME) method and a deep neural network. The two are combined into a single unified framework, named DeepUME, trained end-to-end and in an unsupervised manner. To successfully provide a global solution in the presence of large transformations, we employ an SO(3)-invariant coordinate system to learn both a joint-resampling strategy of the point clouds and SO(3)-invariant features. These features are then utilized by the geometric UME method for transformation estimation. The parameters of DeepUME are optimized using a metric designed to overcome an ambiguity problem emerging in the registration of symmetric shapes, when noisy scenarios are considered. We show that our hybrid method outperforms state-of-the-art registration methods in various scenarios, and generalizes well to unseen data sets. Our code is publicly available.