 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimally Invasive Live Tissue High-fidelity Thermophysical Modeling using Real-time Thermography
Jan 23, 2023

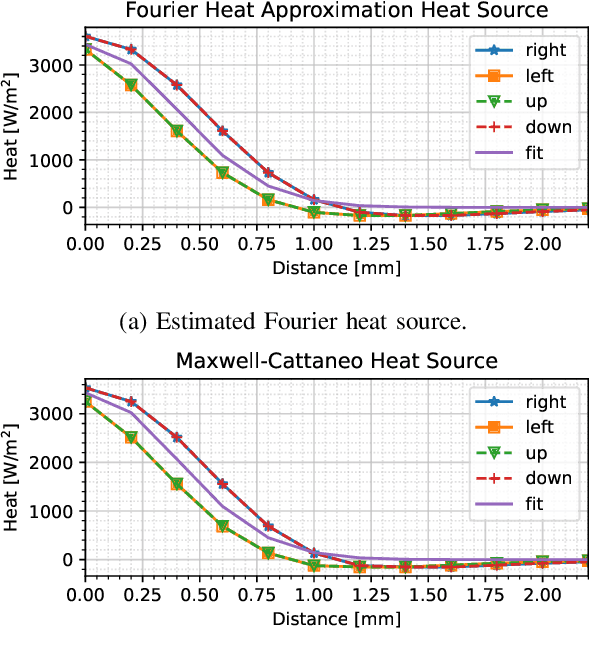
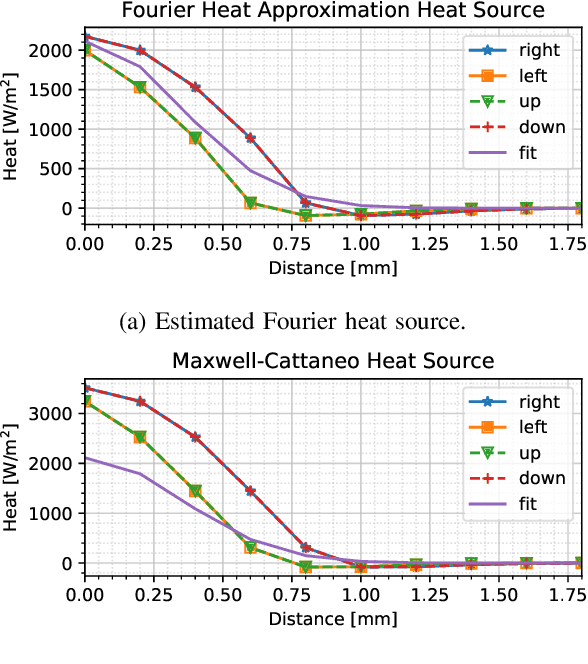
We present a novel thermodynamic parameter estimation framework for energy-based surgery on live tissue, with direct applications to tissue characterization during electrosurgery. This framework addresses the problem of estimating tissue-specific thermodynamics in real-time, which would enable accurate prediction of thermal damage impact to the tissue and damage-conscious planning of electrosurgical procedures. Our approach provides basic thermodynamic information such as thermal diffusivity, and also allows for obtaining the thermal relaxation time and a model of the heat source, yielding in real-time a controlled hyperbolic thermodynamics model. The latter accounts for the finite thermal propagation time necessary for modeling of the electrosurgical action, in which the probe motion speed often surpasses the speed of thermal propagation in the tissue operated on. Our approach relies solely on thermographer feedback and a knowledge of the power level and position of the electrosurgical pencil, imposing only very minor adjustments to normal electrosurgery to obtain a high-fidelity model of the tissue-probe interaction. Our method is minimally invasive and can be performed in situ. We apply our method first to simulated data based on porcine muscle tissue to verify its accuracy and then to in vivo liver tissue, and compare the results with those from the literature. This comparison shows that parameterizing the Maxwell--Cattaneo model through the framework proposed yields a noticeably higher fidelity real-time adaptable representation of the thermodynamic tissue response to the electrosurgical impact than currently available. A discussion on the differences between the live and the dead tissue thermodynamics is also provided.
Infinite-Dimensional Adaptive Boundary Observer for Inner-Domain Temperature Estimation of 3D Electrosurgical Processes using Surface Thermography Sensing
Nov 01, 2022We present a novel 3D adaptive observer framework for use in the determination of subsurface organic tissue temperatures in electrosurgery. The observer structure leverages pointwise 2D surface temperature readings obtained from a real-time infrared thermographer for both parameter estimation and temperature field observation. We introduce a novel approach to decoupled parameter adaptation and estimation, wherein the parameter estimation can run in real-time, while the observer loop runs on a slower time scale. To achieve this, we introduce a novel parameter estimation method known as attention-based noise-robust averaging, in which surface thermography time series are used to directly estimate the tissue's diffusivity. Our observer contains a real-time parameter adaptation component based on this diffusivity adaptation law, as well as a Luenberger-type corrector based on the sensed surface temperature. In this work, we also present a novel model structure adapted to the setting of robotic surgery, wherein we model the electrosurgical heat distribution as a compactly supported magnitude- and velocity-controlled heat source involving a new nonlinear input mapping. We demonstrate satisfactory performance of the adaptive observer in simulation, using real-life experimental ex vivo porcine tissue data.
Physics-based Learning of Parameterized Thermodynamics from Real-time Thermography
Mar 24, 2022


Progress in automatic control of thermal processes has long been limited by the difficulty of obtaining high-fidelity thermodynamic models. Traditionally, in complex thermodynamic systems, it is often infeasible to estimate the thermophysical parameters of spatiotemporally varying processes, forcing the adoption of model-free control architectures. This comes at the cost of losing any robustness guarantees, and implies a need for extensive real-life testing. In recent years, however, infrared cameras and other thermographic equipment have become readily applicable to these processes, allowing for a real-time, non-invasive means of sensing the thermal state of a process. In this work, we present a novel physics-based approach to learning a thermal process's dynamics directly from such real-time thermographic data, while focusing attention on regions with high thermal activity. We call this process, which applies to any higher-dimensional scalar field, attention-based noise robust averaging (ANRA). Given a partial-differential equation model structure, we show that our approach is robust against noise, and can be used to initialize optimization routines to further refine parameter estimates. We demonstrate our method on several simulation examples, as well as by applying it to electrosurgical thermal response data on in vivo porcine skin tissue.
Lodestar: An Integrated Embedded Real-Time Control Engine
Mar 01, 2022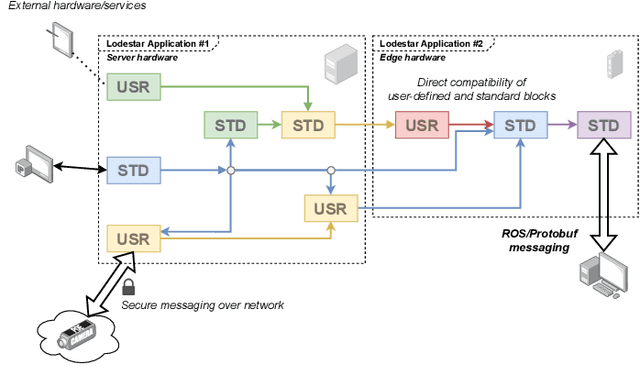
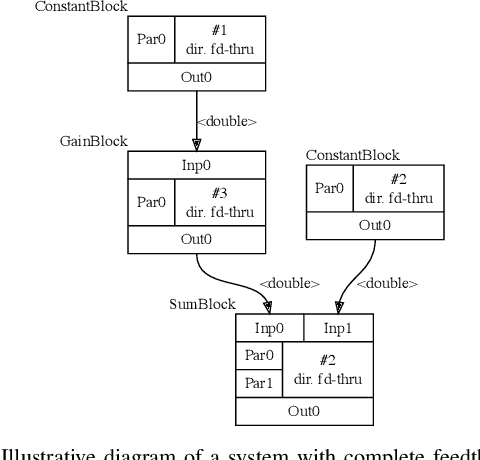
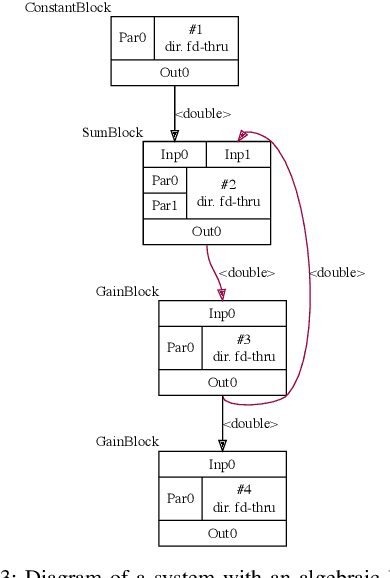
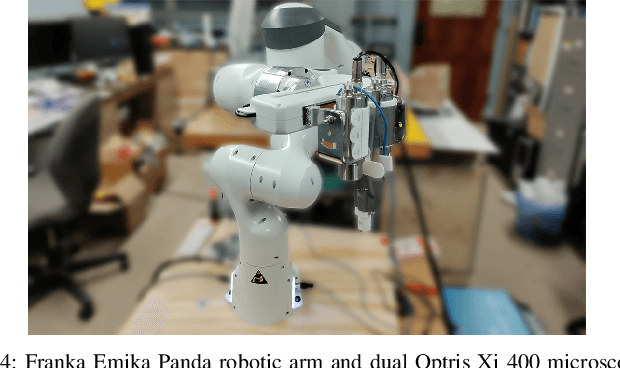
In this work we present Lodestar, an integrated engine for rapid real-time control system development. Using a functional block diagram paradigm, Lodestar allows for complex multi-disciplinary control software design, while automatically resolving execution order, circular data-dependencies, and networking. In particular, Lodestar presents a unified set of control, signal processing, and computer vision routines to users, which may be interfaced with external hardware and software packages using interoperable user-defined wrappers. Lodestar allows for user-defined block diagrams to be directly executed, or for them to be translated to overhead-free source code for integration in other programs. We demonstrate how our framework departs from approaches used in state-of-the-art simulation frameworks to enable real-time performance, and compare its capabilities to existing solutions in the realm of control software. To demonstrate the utility of Lodestar in real-time control systems design, we have applied Lodestar to implement two real-time torque-based controller for a robotic arm. In addition, we have developed a novel autofocus algorithm for use in thermography-based localization and parameter estimation in electrosurgery and other areas of robot-assisted surgery. We compare our algorithm design approach in Lodestar to a classical ground-up approach, showing that Lodestar considerably eases the design process. We also show how Lodestar can seamlessly interface with existing simulation and networking framework in a number of simulation examples.