 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing Through Clutter With Movability Awareness of Blocking Obstacles
Feb 27, 2025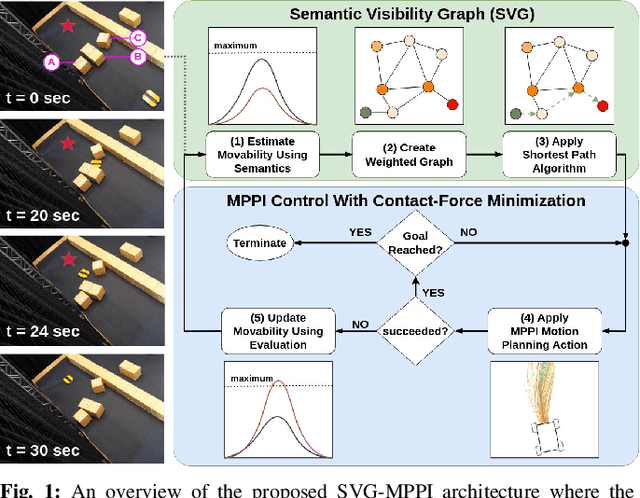
Navigation Among Movable Obstacles (NAMO) poses a challenge for traditional path-planning methods when obstacles block the path, requiring push actions to reach the goal. We propose a framework that enables movability-aware planning to overcome this challenge without relying on explicit obstacle placement. Our framework integrates a global Semantic Visibility Graph and a local Model Predictive Path Integral (SVG-MPPI) approach to efficiently sample rollouts, taking into account the continuous range of obstacle movability. A physics engine is adopted to simulate the interaction result of the rollouts with the environment, and generate trajectories that minimize contact force. In qualitative and quantitative experiments, SVG-MPPI outperforms the existing paradigm that uses only binary movability for planning, achieving higher success rates with reduced cumulative contact forces. Our code is available at: https://github.com/tud-amr/SVG-MPPI