 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe State of Service Robots: Current Bottlenecks in Object Perception and Manipulation
Mar 18, 2020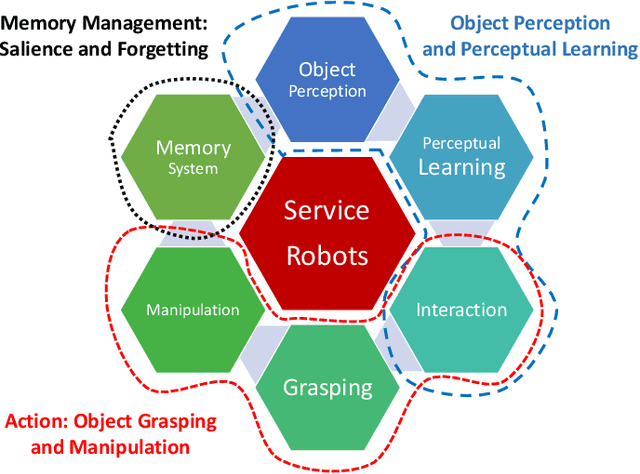
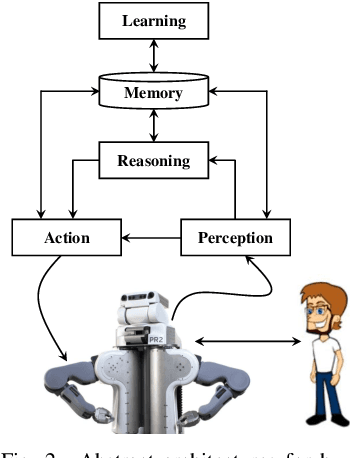
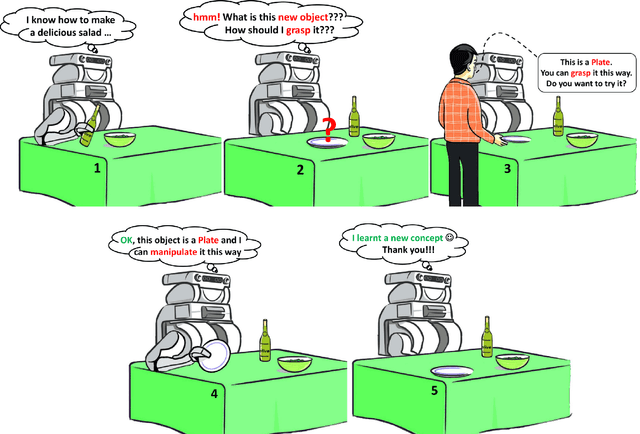
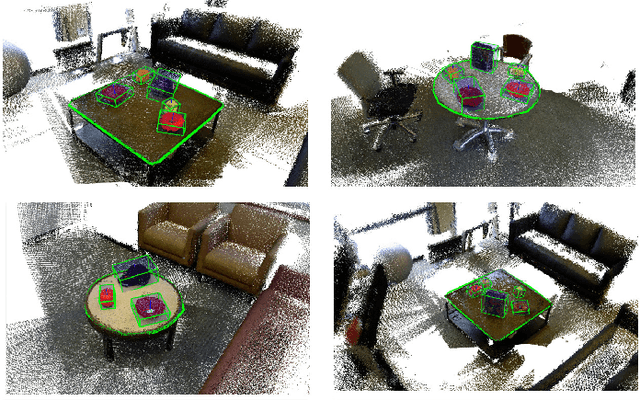
Service robots are appearing more and more in our daily life. The development of service robots combines multiple fields of research, from object perception to object manipulation. The state-of-the-art continues to improve to make a proper coupling between object perception and manipulation. This coupling is necessary for service robots not only to perform various tasks in a reasonable amount of time but also to adapt to new environments through time and interact with non-expert human users safely. Nowadays, robots are able to recognize various objects, and quickly plan a collision-free trajectory to grasp a target object. While there are many successes, the robot should be painstakingly coded in advance to perform a set of predefined tasks. Besides, in most of the cases, there is a reliance on large amounts of training data. Therefore, the knowledge of such robots is fixed after the training phase, and any changes in the environment require complicated, time-consuming, and expensive robot re-programming by human experts. Therefore, these approaches are still too rigid for real-life applications in unstructured environments, where a significant portion of the environment is unknown and cannot be directly sensed or controlled. In this paper, we review advances in service robots from object perception to complex object manipulation and shed a light on the current challenges and bottlenecks.