 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty quantification in model discovery by distilling interpretable material constitutive models from Gaussian process posteriors
Oct 25, 2025Constitutive model discovery refers to the task of identifying an appropriate model structure, usually from a predefined model library, while simultaneously inferring its material parameters. The data used for model discovery are measured in mechanical tests and are thus inevitably affected by noise which, in turn, induces uncertainties. Previously proposed methods for uncertainty quantification in model discovery either require the selection of a prior for the material parameters, are restricted to the linear coefficients of the model library or are limited in the flexibility of the inferred parameter probability distribution. We therefore propose a four-step partially Bayesian framework for uncertainty quantification in model discovery that does not require prior selection for the material parameters and also allows for the discovery of non-linear constitutive models: First, we augment the available stress-deformation data with a Gaussian process. Second, we approximate the parameter distribution by a normalizing flow, which allows for capturing complex joint distributions. Third, we distill the parameter distribution by matching the distribution of stress-deformation functions induced by the parameters with the Gaussian process posterior. Fourth, we perform a Sobol' sensitivity analysis to obtain a sparse and interpretable model. We demonstrate the capability of our framework for both isotropic and anisotropic experimental data as well as linear and non-linear model libraries.
Automated Constitutive Model Discovery by Pairing Sparse Regression Algorithms with Model Selection Criteria
Sep 19, 2025The automated discovery of constitutive models from data has recently emerged as a promising alternative to the traditional model calibration paradigm. In this work, we present a fully automated framework for constitutive model discovery that systematically pairs three sparse regression algorithms (Least Absolute Shrinkage and Selection Operator (LASSO), Least Angle Regression (LARS), and Orthogonal Matching Pursuit (OMP)) with three model selection criteria: $K$-fold cross-validation (CV), Akaike Information Criterion (AIC), and Bayesian Information Criterion (BIC). This pairing yields nine distinct algorithms for model discovery and enables a systematic exploration of the trade-off between sparsity, predictive performance, and computational cost. While LARS serves as an efficient path-based solver for the $\ell_1$-constrained problem, OMP is introduced as a tractable heuristic for $\ell_0$-regularized selection. The framework is applied to both isotropic and anisotropic hyperelasticity, utilizing both synthetic and experimental datasets. Results reveal that all nine algorithm-criterion combinations perform consistently well for the discovery of isotropic and anisotropic materials, yielding highly accurate constitutive models. These findings broaden the range of viable discovery algorithms beyond $\ell_1$-based approaches such as LASSO.
Drivetrain simulation using variational autoencoders
Jan 29, 2025
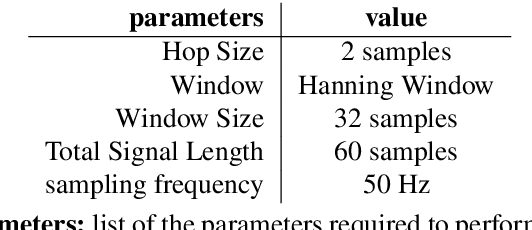
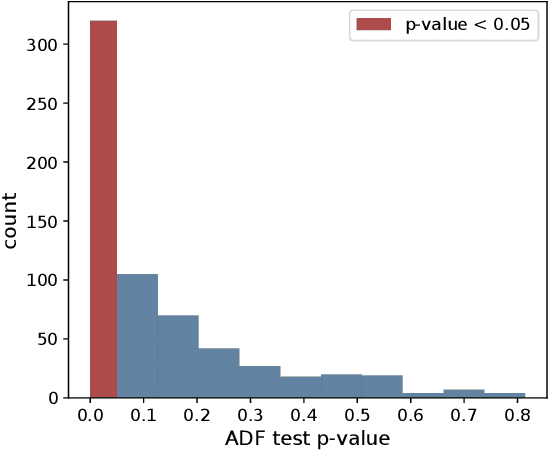
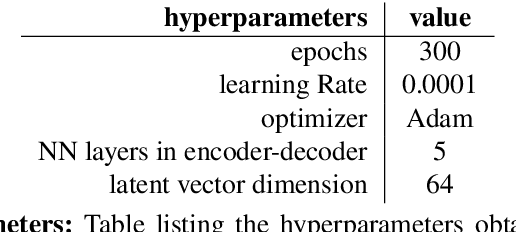
This work proposes variational autoencoders (VAEs) to predict a vehicle's jerk from a given torque demand, addressing the limitations of sparse real-world datasets. Specifically, we implement unconditional and conditional VAEs to generate jerk signals that integrate features from different drivetrain scenarios. The VAEs are trained on experimental data collected from two variants of a fully electric SUV, which differ in maximum torque delivery and drivetrain configuration. New meaningful jerk signals are generated within an engineering context through the interpretation of the VAE's latent space. A performance comparison with baseline physics-based and hybrid models confirms the effectiveness of the VAEs. We show that VAEs bypass the need for exhaustive manual system parametrization while maintaining physical plausibility by conditioning data generation on specific inputs.