 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegmentation et Interprétation de Nuages de Points pour la Modélisation d'Environnements Urbains
Jun 13, 2013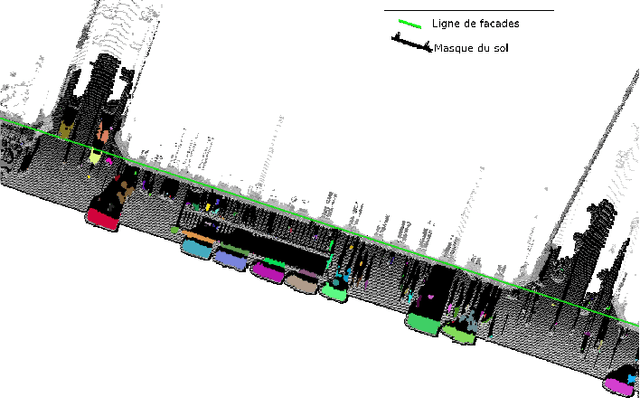
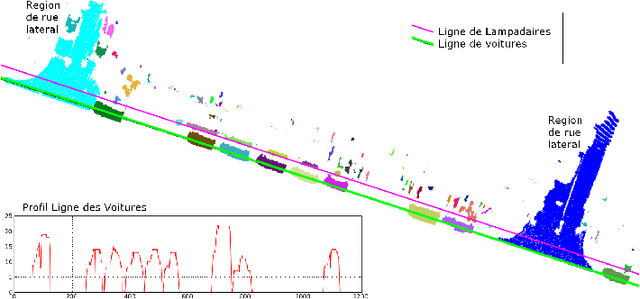
Dans cet article, nous pr\'esentons une m\'ethode pour la d\'etection et la classification d'artefacts au niveau du sol, comme phase de filtrage pr\'ealable \`a la mod\'elisation d'environnements urbains. La m\'ethode de d\'etection est r\'ealis\'ee sur l'image profondeur, une projection de nuage de points sur un plan image o\`u la valeur du pixel correspond \`a la distance du point au plan. En faisant l'hypoth\`ese que les artefacts sont situ\'es au sol, ils sont d\'etect\'es par une transformation de chapeau haut de forme par remplissage de trous sur l'image de profondeur. Les composantes connexes ainsi obtenues, sont ensuite caract\'eris\'ees et une analyse des variables est utilis\'ee pour la s\'election des caract\'eristiques les plus discriminantes. Les composantes connexes sont donc classifi\'ees en quatre cat\'egories (lampadaires, pi\'etons, voitures et "Reste") \`a l'aide d'un algorithme d'apprentissage supervis\'e. La m\'ethode a \'et\'e test\'ee sur des nuages de points de la ville de Paris, en montrant de bons r\'esultats de d\'etection et de classification dans l'ensemble de donn\'ees.---In this article, we present a method for detection and classification of artifacts at the street level, in order to filter cloud point, facilitating the urban modeling process. Our approach exploits 3D information by using range image, a projection of 3D points onto an image plane where the pixel intensity is a function of the measured distance between 3D points and the plane. By assuming that the artifacts are on the ground, they are detected using a Top-Hat of the hole filling algorithm of range images. Then, several features are extracted from the detected connected components and a stepwise forward variable/model selection by using the Wilk's Lambda criterion is performed. Afterward, CCs are classified in four categories (lampposts, pedestrians, cars and others) by using a supervised machine learning method. The proposed method was tested on cloud points of Paris, and have shown satisfactory results on the whole dataset.