 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecomposable Neuro Symbolic Regression
Nov 06, 2025
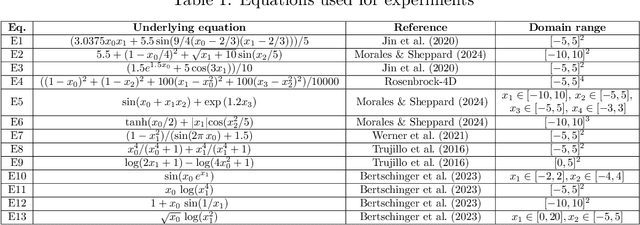
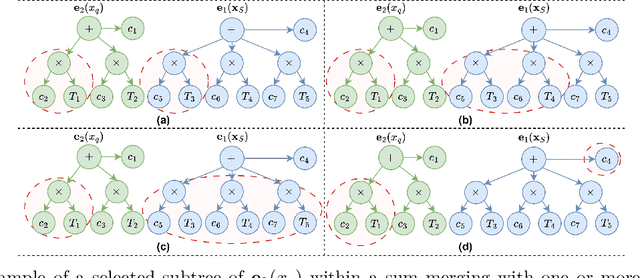
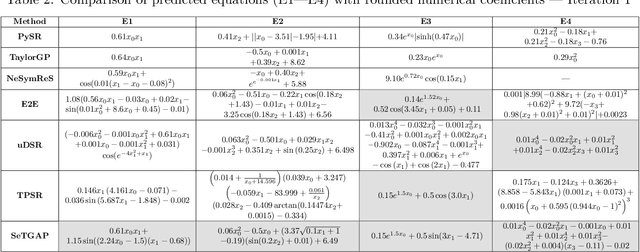
Symbolic regression (SR) models complex systems by discovering mathematical expressions that capture underlying relationships in observed data. However, most SR methods prioritize minimizing prediction error over identifying the governing equations, often producing overly complex or inaccurate expressions. To address this, we present a decomposable SR method that generates interpretable multivariate expressions leveraging transformer models, genetic algorithms (GAs), and genetic programming (GP). In particular, our explainable SR method distills a trained ``opaque'' regression model into mathematical expressions that serve as explanations of its computed function. Our method employs a Multi-Set Transformer to generate multiple univariate symbolic skeletons that characterize how each variable influences the opaque model's response. We then evaluate the generated skeletons' performance using a GA-based approach to select a subset of high-quality candidates before incrementally merging them via a GP-based cascade procedure that preserves their original skeleton structure. The final multivariate skeletons undergo coefficient optimization via a GA. We evaluated our method on problems with controlled and varying degrees of noise, demonstrating lower or comparable interpolation and extrapolation errors compared to two GP-based methods, three neural SR methods, and a hybrid approach. Unlike them, our approach consistently learned expressions that matched the original mathematical structure.
Univariate Skeleton Prediction in Multivariate Systems Using Transformers
Jun 25, 2024Symbolic regression (SR) methods attempt to learn mathematical expressions that approximate the behavior of an observed system. However, when dealing with multivariate systems, they often fail to identify the functional form that explains the relationship between each variable and the system's response. To begin to address this, we propose an explainable neural SR method that generates univariate symbolic skeletons that aim to explain how each variable influences the system's response. By analyzing multiple sets of data generated artificially, where one input variable varies while others are fixed, relationships are modeled separately for each input variable. The response of such artificial data sets is estimated using a regression neural network (NN). Finally, the multiple sets of input-response pairs are processed by a pre-trained Multi-Set Transformer that solves a problem we termed Multi-Set Skeleton Prediction and outputs a univariate symbolic skeleton. Thus, such skeletons represent explanations of the function approximated by the regression NN. Experimental results demonstrate that this method learns skeleton expressions matching the underlying functions and outperforms two GP-based and two neural SR methods.
Dual Accuracy-Quality-Driven Neural Network for Prediction Interval Generation
Dec 13, 2022



Accurate uncertainty quantification is necessary to enhance the reliability of deep learning models in real-world applications. In the case of regression tasks, prediction intervals (PIs) should be provided along with the deterministic predictions of deep learning models. Such PIs are useful or "high-quality'' as long as they are sufficiently narrow and capture most of the probability density. In this paper, we present a method to learn prediction intervals for regression-based neural networks automatically in addition to the conventional target predictions. In particular, we train two companion neural networks: one that uses one output, the target estimate, and another that uses two outputs, the upper and lower bounds of the corresponding PI. Our main contribution is the design of a loss function for the PI-generation network that takes into account the output of the target-estimation network and has two optimization objectives: minimizing the mean prediction interval width and ensuring the PI integrity using constraints that maximize the prediction interval probability coverage implicitly. Both objectives are balanced within the loss function using a self-adaptive coefficient. Furthermore, we apply a Monte Carlo-based approach that evaluates the model uncertainty in the learned PIs. Experiments using a synthetic dataset, six benchmark datasets, and a real-world crop yield prediction dataset showed that our method was able to maintain a nominal probability coverage and produce narrower PIs without detriment to its target estimation accuracy when compared to those PIs generated by three state-of-the-art neural-network-based methods.
Two-dimensional Deep Regression for Early Yield Prediction of Winter Wheat
Nov 15, 2021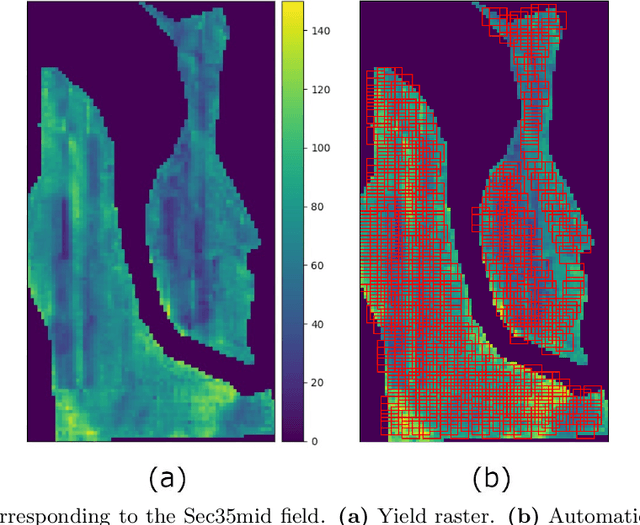
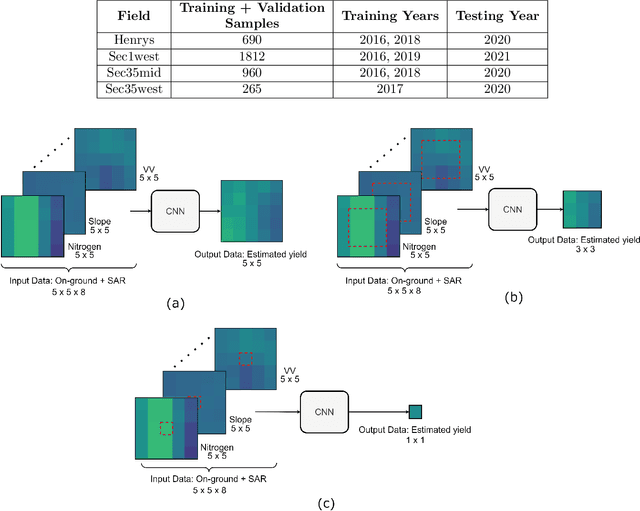
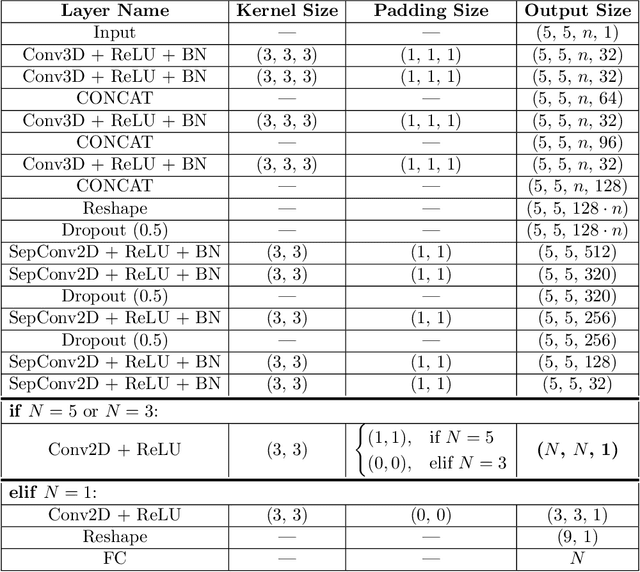
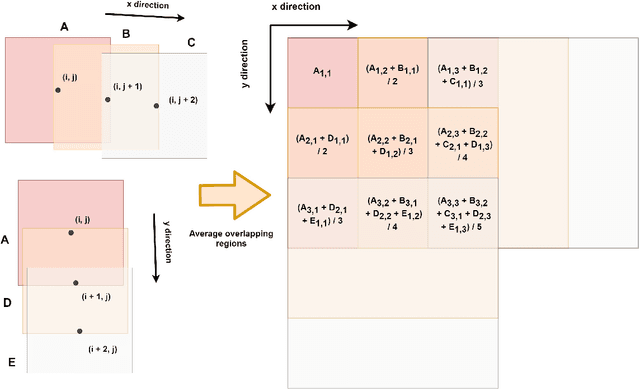
Crop yield prediction is one of the tasks of Precision Agriculture that can be automated based on multi-source periodic observations of the fields. We tackle the yield prediction problem using a Convolutional Neural Network (CNN) trained on data that combines radar satellite imagery and on-ground information. We present a CNN architecture called Hyper3DNetReg that takes in a multi-channel input image and outputs a two-dimensional raster, where each pixel represents the predicted yield value of the corresponding input pixel. We utilize radar data acquired from the Sentinel-1 satellites, while the on-ground data correspond to a set of six raster features: nitrogen rate applied, precipitation, slope, elevation, topographic position index (TPI), and aspect. We use data collected during the early stage of the winter wheat growing season (March) to predict yield values during the harvest season (August). We present experiments over four fields of winter wheat and show that our proposed methodology yields better results than five compared methods, including multiple linear regression, an ensemble of feedforward networks using AdaBoost, a stacked autoencoder, and two other CNN architectures.