 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring a Robot Hand's Graspable Region using Power and Precision Grasps
Apr 27, 2022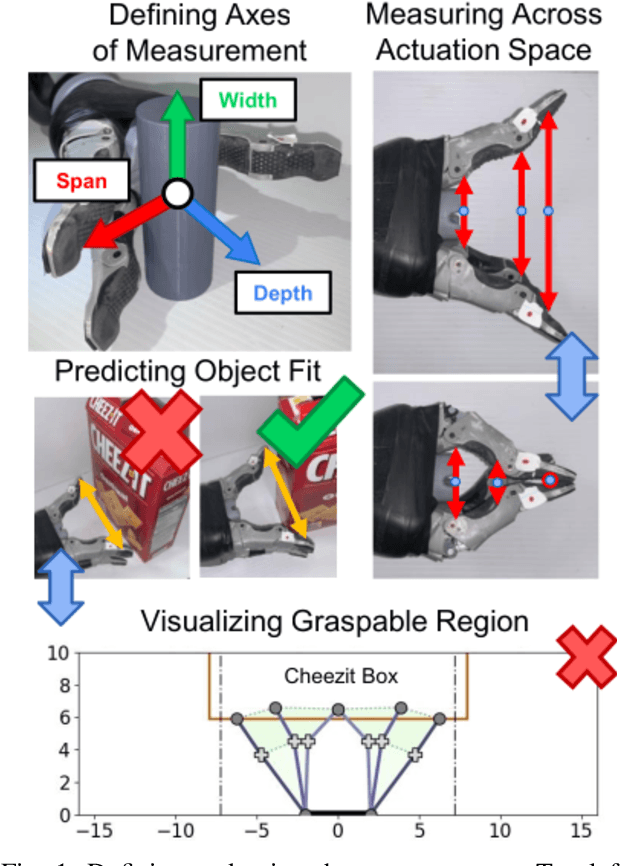
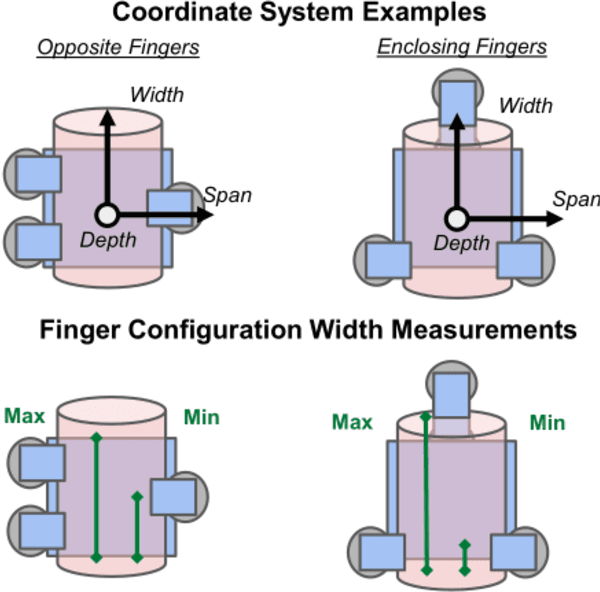
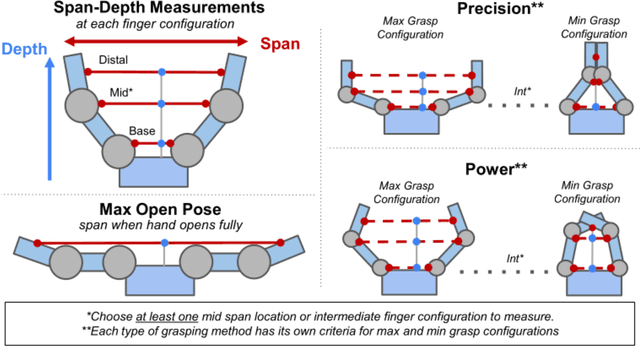
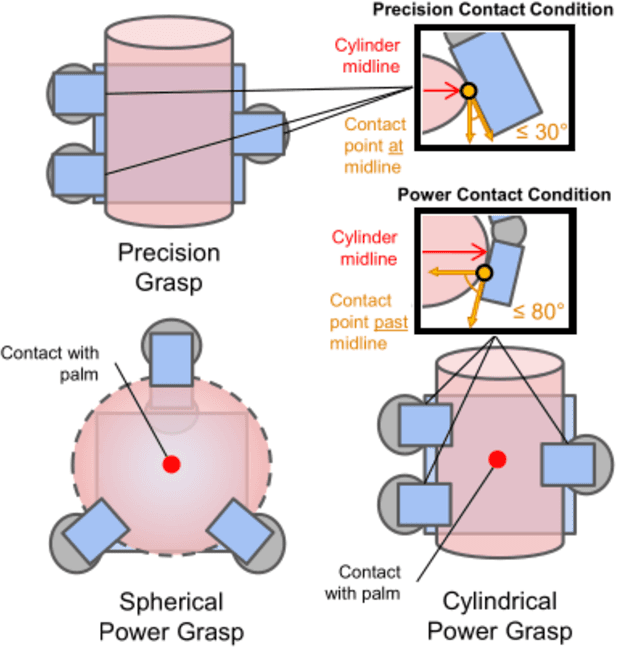
The variety of robotic hand designs and actuation schemes makes it difficult to measure a hand's graspable volume. For end-users, this lack of standardized measurements makes it challenging to determine a priori if a robot hand is the right size for grasping an object. We propose a practical hand measurement standard, based on precision and power grasps, that is applicable to a wide variety of robot hand designs. The resulting measurements can be used to both determine if an object will fit in the hand and characterize the size of an object with respect to the hand. Our measurement procedure uses a functional approach, based on grasping a hypothetical cylinder, that allows the measurer choose the exact hand orientation and finger configurations that are used for the measurements. This ensures that the measurements are functionally comparable while relying on the human to determine the finger configurations that best match the intended grasp. We demonstrate using our measurement standard with three commercial robot hand designs and objects from the YCB data set.
Grasping Benchmarks: Normalizing for Object Size \& Approximating Hand Workspaces
Jun 19, 2021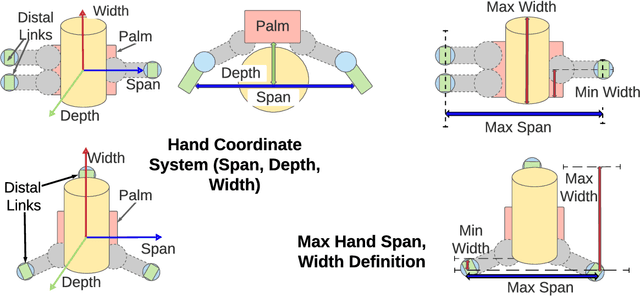
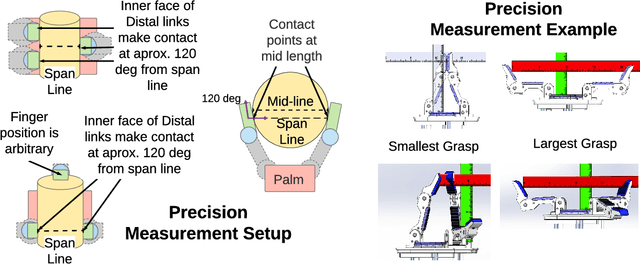
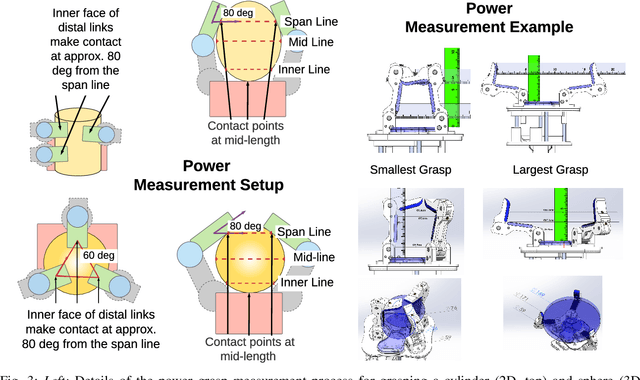
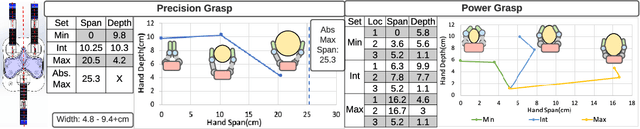
The varied landscape of robotic hand designs makes it difficult to set a standard for how to measure hand size and to communicate the size of objects it can grasp. Defining consistent workspace measurements would greatly assist scientific communication in robotic grasping research because it would allow researchers to 1) quantitatively communicate an object's relative size to a hand's and 2) approximate a functional subspace of a hand's kinematic workspace in a human-readable way. The goal of this paper is to specify a measurement procedure that quantitatively captures a hand's workspace size for both a precision and power grasp. This measurement procedure uses a {\em functional} approach -- based on a generic grasping scenario of a hypothetical object -- in order to make the procedure as generalizable and repeatable as possible, regardless of the actual hand design. This functional approach lets the measurer choose the exact finger configurations and contact points that satisfy the generic grasping scenario, while ensuring that the measurements are {\em functionally} comparable. We demonstrate these functional measurements on seven hand configurations. Additional hand measurements and instructions are provided in a GitHub Repository.