 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk assessment and observation of driver with pedestrian using instantaneous heart rate and HRV
Feb 10, 2024



Currently, human drivers outperform self-driving vehicles in many conditions such as collision avoidance. Therefore, understanding human driver behaviour in these conditions will provide insight for future autonomous vehicles. For understanding driver behaviour, risk assessment is applied so far as one of the approaches by using both subjective and objective measurement. Subjective measurement methods such as questionnaires may provide insight into driver risk assessment but there is often significant variability between drivers.Physiological measurements such as heart rate (HR), electroencephalogram (EEG), and electromyogram (EMG) provide more objective measurements of driver risk assessment. HR is often used for measuring driver risk assessment based on observed correlations between HR and risk perception. Previous work has used HR to measure driver risk assessment in self-driving systems, but pedestrian dynamics is not considered for the research. In this study, we observed driver behaviour in certain scenarios which have pedestrian on driving simulator. The scenarios have safe/unsafe situations (i.e., pedestrian crosses road and vehicle may hit pedestrian in one scenario), HR analysis in time/frequency domain is processed for risk assessment. As a result, HR analysis in frequency domain shows certain reasonability for driver risk assessment when driver has pedestrian in its traffic.
LiDAR and Camera Detection Fusion in a Real Time Industrial Multi-Sensor Collision Avoidance System
Jul 11, 2018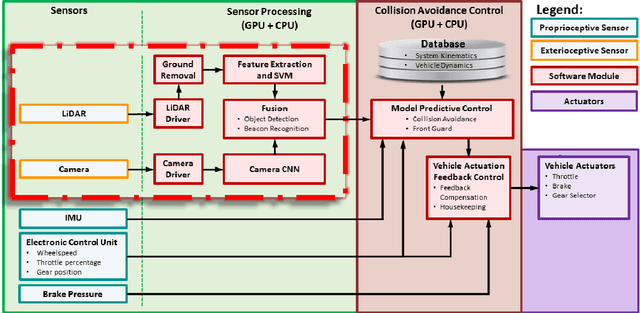

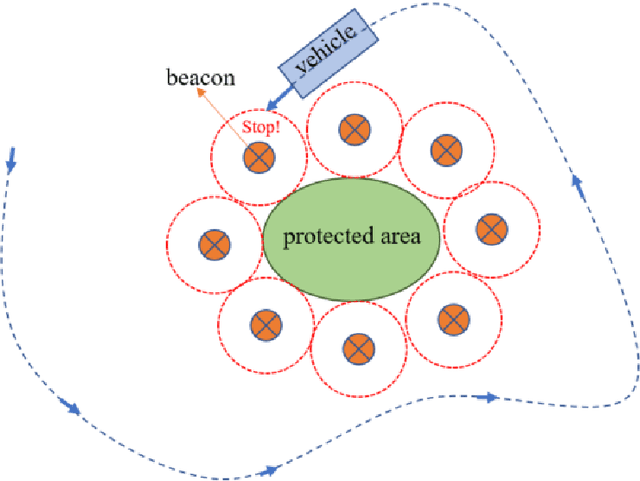
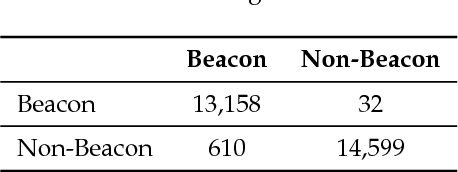
Collision avoidance is a critical task in many applications, such as ADAS (advanced driver-assistance systems), industrial automation and robotics. In an industrial automation setting, certain areas should be off limits to an automated vehicle for protection of people and high-valued assets. These areas can be quarantined by mapping (e.g., GPS) or via beacons that delineate a no-entry area. We propose a delineation method where the industrial vehicle utilizes a LiDAR {(Light Detection and Ranging)} and a single color camera to detect passive beacons and model-predictive control to stop the vehicle from entering a restricted space. The beacons are standard orange traffic cones with a highly reflective vertical pole attached. The LiDAR can readily detect these beacons, but suffers from false positives due to other reflective surfaces such as worker safety vests. Herein, we put forth a method for reducing false positive detection from the LiDAR by projecting the beacons in the camera imagery via a deep learning method and validating the detection using a neural network-learned projection from the camera to the LiDAR space. Experimental data collected at Mississippi State University's Center for Advanced Vehicular Systems (CAVS) shows the effectiveness of the proposed system in keeping the true detection while mitigating false positives.
* 34 pages