 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Generative Adversarial Networks for Speed Control in Trajectory Simulation
Mar 21, 2021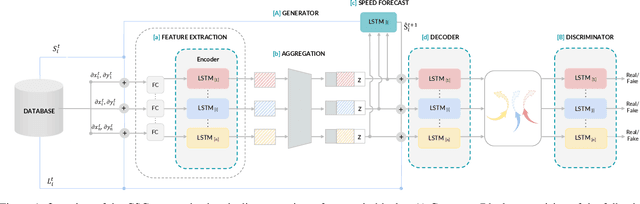
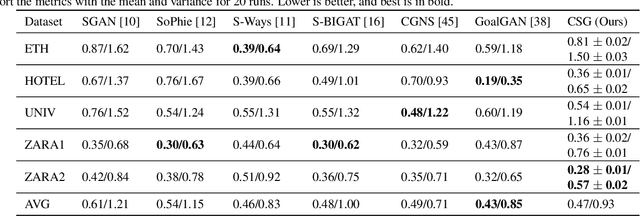
Motion behaviour is driven by several factors -- goals, presence and actions of neighbouring agents, social relations, physical and social norms, the environment with its variable characteristics, and further. Most factors are not directly observable and must be modelled from context. Trajectory prediction, is thus a hard problem, and has seen increasing attention from researchers in the recent years. Prediction of motion, in application, must be realistic, diverse and controllable. In spite of increasing focus on multimodal trajectory generation, most methods still lack means for explicitly controlling different modes of the data generation. Further, most endeavours invest heavily in designing special mechanisms to learn the interactions in latent space. We present Conditional Speed GAN (CSG), that allows controlled generation of diverse and socially acceptable trajectories, based on user controlled speed. During prediction, CSG forecasts future speed from latent space and conditions its generation based on it. CSG is comparable to state-of-the-art GAN methods in terms of the benchmark distance metrics, while being simple and useful for simulation and data augmentation for different contexts such as fast or slow paced environments. Additionally, we compare the effect of different aggregation mechanisms and show that a naive approach of concatenation works comparable to its attention and pooling alternatives.
Investigating Extensions to Random Walk Based Graph Embedding
Feb 17, 2020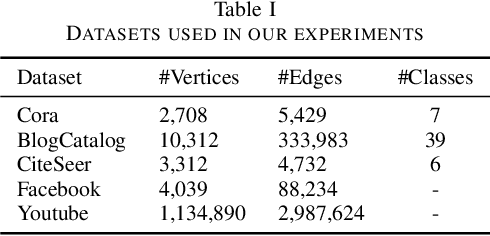
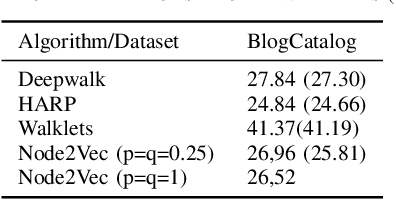

Graph embedding has recently gained momentum in the research community, in particular after the introduction of random walk and neural network based approaches. However, most of the embedding approaches focus on representing the local neighborhood of nodes and fail to capture the global graph structure, i.e. to retain the relations to distant nodes. To counter that problem, we propose a novel extension to random walk based graph embedding, which removes a percentage of least frequent nodes from the walks at different levels. By this removal, we simulate farther distant nodes to reside in the close neighborhood of a node and hence explicitly represent their connection. Besides the common evaluation tasks for graph embeddings, such as node classification and link prediction, we evaluate and compare our approach against related methods on shortest path approximation. The results indicate, that extensions to random walk based methods (including our own) improve the predictive performance only slightly - if at all.
Shortest path distance approximation using deep learning techniques
Feb 12, 2020
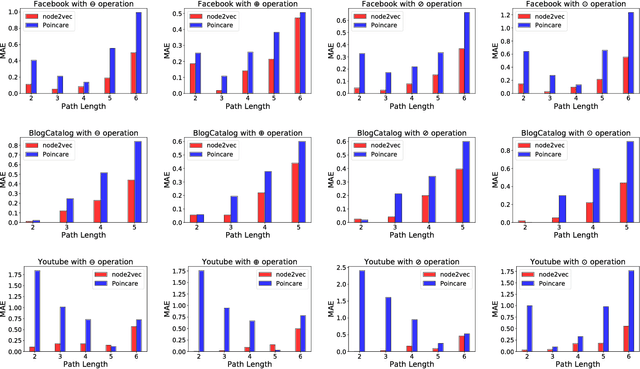

Computing shortest path distances between nodes lies at the heart of many graph algorithms and applications. Traditional exact methods such as breadth-first-search (BFS) do not scale up to contemporary, rapidly evolving today's massive networks. Therefore, it is required to find approximation methods to enable scalable graph processing with a significant speedup. In this paper, we utilize vector embeddings learnt by deep learning techniques to approximate the shortest paths distances in large graphs. We show that a feedforward neural network fed with embeddings can approximate distances with relatively low distortion error. The suggested method is evaluated on the Facebook, BlogCatalog, Youtube and Flickr social networks.