 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Output Steps: FlexiSteps Network for Dynamic Trajectory Prediction
Aug 25, 2025Accurate trajectory prediction is vital for autonomous driving, robotics, and intelligent decision-making systems, yet traditional models typically rely on fixed-length output predictions, limiting their adaptability to dynamic real-world scenarios. In this paper, we introduce the FlexiSteps Network (FSN), a novel framework that dynamically adjusts prediction output time steps based on varying contextual conditions. Inspired by recent advancements addressing observation length discrepancies and dynamic feature extraction, FSN incorporates an pre-trained Adaptive Prediction Module (APM) to evaluate and adjust the output steps dynamically, ensuring optimal prediction accuracy and efficiency. To guarantee the plug-and-play of our FSN, we also design a Dynamic Decoder(DD). Additionally, to balance the prediction time steps and prediction accuracy, we design a scoring mechanism, which not only introduces the Fr\'echet distance to evaluate the geometric similarity between the predicted trajectories and the ground truth trajectories but the length of predicted steps is also considered. Extensive experiments conducted on benchmark datasets including Argoverse and INTERACTION demonstrate the effectiveness and flexibility of our proposed FSN framework.
GAMDTP: Dynamic Trajectory Prediction with Graph Attention Mamba Network
Apr 07, 2025
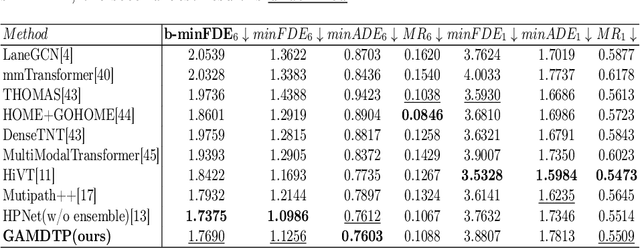


Accurate motion prediction of traffic agents is crucial for the safety and stability of autonomous driving systems. In this paper, we introduce GAMDTP, a novel graph attention-based network tailored for dynamic trajectory prediction. Specifically, we fuse the result of self attention and mamba-ssm through a gate mechanism, leveraging the strengths of both to extract features more efficiently and accurately, in each graph convolution layer. GAMDTP encodes the high-definition map(HD map) data and the agents' historical trajectory coordinates and decodes the network's output to generate the final prediction results. Additionally, recent approaches predominantly focus on dynamically fusing historical forecast results and rely on two-stage frameworks including proposal and refinement. To further enhance the performance of the two-stage frameworks we also design a scoring mechanism to evaluate the prediction quality during the proposal and refinement processes. Experiments on the Argoverse dataset demonstrates that GAMDTP achieves state-of-the-art performance, achieving superior accuracy in dynamic trajectory prediction.