 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirHunt: Bridging VLM Semantics and Continuous Planning for Efficient Aerial Object Navigation
Jan 19, 2026Recent advances in large Vision-Language Models (VLMs) have provided rich semantic understanding that empowers drones to search for open-set objects via natural language instructions. However, prior systems struggle to integrate VLMs into practical aerial systems due to orders-of-magnitude frequency mismatch between VLM inference and real-time planning, as well as VLMs' limited 3D scene understanding. They also lack a unified mechanism to balance semantic guidance with motion efficiency in large-scale environments. To address these challenges, we present AirHunt, an aerial object navigation system that efficiently locates open-set objects with zero-shot generalization in outdoor environments by seamlessly fusing VLM semantic reasoning with continuous path planning. AirHunt features a dual-pathway asynchronous architecture that establishes a synergistic interface between VLM reasoning and path planning, enabling continuous flight with adaptive semantic guidance that evolves through motion. Moreover, we propose an active dual-task reasoning module that exploits geometric and semantic redundancy to enable selective VLM querying, and a semantic-geometric coherent planning module that dynamically reconciles semantic priorities and motion efficiency in a unified framework, enabling seamless adaptation to environmental heterogeneity. We evaluate AirHunt across diverse object navigation tasks and environments, demonstrating a higher success rate with lower navigation error and reduced flight time compared to state-of-the-art methods. Real-world experiments further validate AirHunt's practical capability in complex and challenging environments. Code and dataset will be made publicly available before publication.
Manboformer: Learning Gaussian Representations via Spatial-temporal Attention Mechanism
Mar 06, 2025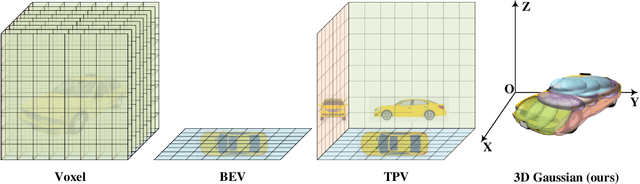


Compared with voxel-based grid prediction, in the field of 3D semantic occupation prediction for autonomous driving, GaussianFormer proposed using 3D Gaussian to describe scenes with sparse 3D semantic Gaussian based on objects is another scheme with lower memory requirements. Each 3D Gaussian function represents a flexible region of interest and its semantic features, which are iteratively refined by the attention mechanism. In the experiment, it is found that the Gaussian function required by this method is larger than the query resolution of the original dense grid network, resulting in impaired performance. Therefore, we consider optimizing GaussianFormer by using unused temporal information. We learn the Spatial-Temporal Self-attention Mechanism from the previous grid-given occupation network and improve it to GaussianFormer. The experiment was conducted with the NuScenes dataset, and the experiment is currently underway.