 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Induction of Bellman-Error Features for Probabilistic Planning
Jan 16, 2014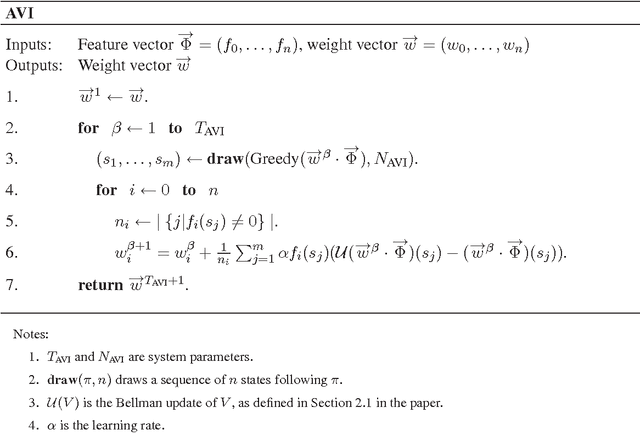
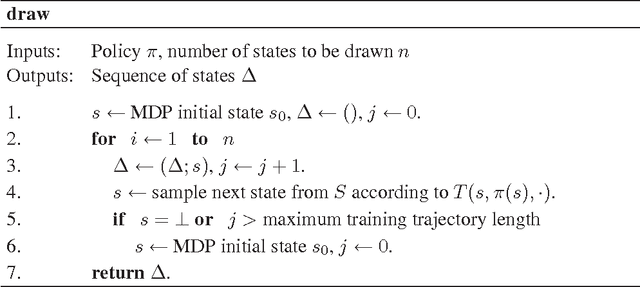
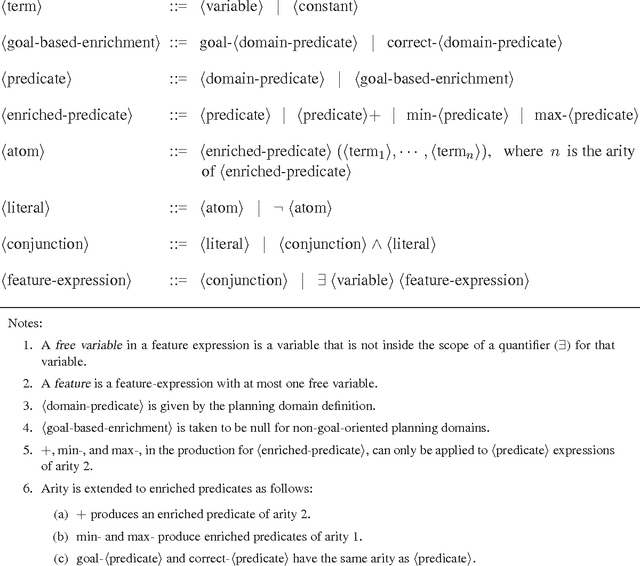
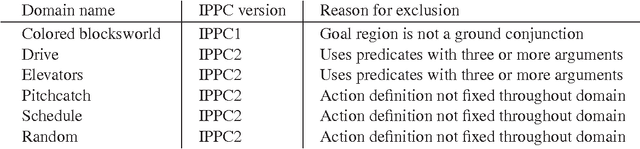
Domain-specific features are important in representing problem structure throughout machine learning and decision-theoretic planning. In planning, once state features are provided, domain-independent algorithms such as approximate value iteration can learn weighted combinations of those features that often perform well as heuristic estimates of state value (e.g., distance to the goal). Successful applications in real-world domains often require features crafted by human experts. Here, we propose automatic processes for learning useful domain-specific feature sets with little or no human intervention. Our methods select and add features that describe state-space regions of high inconsistency in the Bellman equation (statewise Bellman error) during approximate value iteration. Our method can be applied using any real-valued-feature hypothesis space and corresponding learning method for selecting features from training sets of state-value pairs. We evaluate the method with hypothesis spaces defined by both relational and propositional feature languages, using nine probabilistic planning domains. We show that approximate value iteration using a relational feature space performs at the state-of-the-art in domain-independent stochastic relational planning. Our method provides the first domain-independent approach that plays Tetris successfully (without human-engineered features).