 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing Funnels Using Numerical Optimization Based Falsifiers
Sep 23, 2021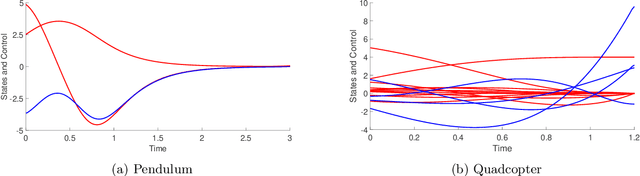
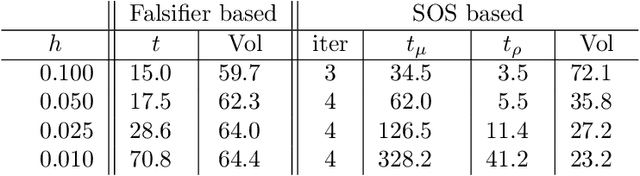
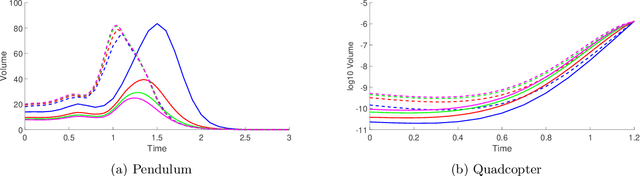
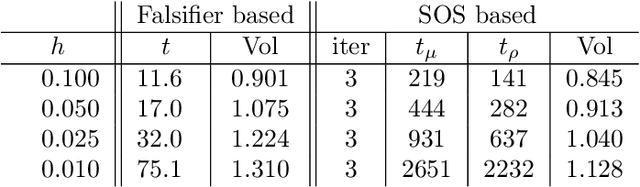
In this paper, we present an algorithm that computes funnels along trajectories of systems of ordinary differential equations. A funnel is a time-varying set of states containing the given trajectory, for which the evolution from within the set at any given time stays in the funnel. Hence it generalizes the behavior of single trajectories to sets around them, which is an important task, for example, in robot motion planning. In contrast to approaches based on sum-of-squares programming, which poorly scale to high dimensions, our approach is based on falsification and tackles the funnel computation task directly, through numerical optimization. This approach computes accurate funnel estimates far more efficiently and leaves formal verification to the end, outside all funnel size optimization loops.