 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Concentric Tube Steerable Drilling Robot for Minimally Invasive Treatment of Spinal Tumors Using Cavity and U-shape Drilling Techniques
May 24, 2023


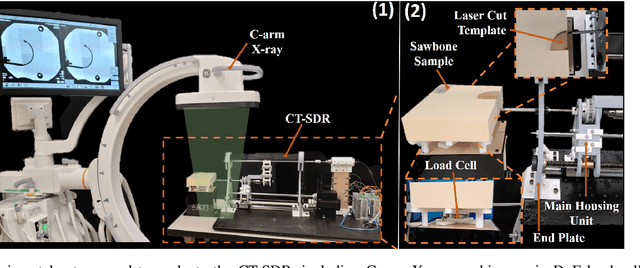
In this paper, we present the design, fabrication, and evaluation of a novel flexible, yet structurally strong, Concentric Tube Steerable Drilling Robot (CT-SDR) to improve minimally invasive treatment of spinal tumors. Inspired by concentric tube robots, the proposed two degree-of-freedom (DoF) CT-SDR, for the first time, not only allows a surgeon to intuitively and quickly drill smooth planar and out-of-plane J- and U- shape curved trajectories, but it also, enables drilling cavities through a hard tissue in a minimally invasive fashion. We successfully evaluated the performance and efficacy of the proposed CT-SDR in drilling various planar and out-of-plane J-shape branch, U-shape, and cavity drilling scenarios on simulated bone materials.