 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal sensing policy with interference-model uncertainty
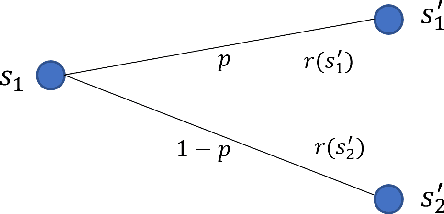
Jun 12, 2024Assume that an interferer behaves according to a parametric model but one does not know the value of the model parameters. Sensing enables to improve the model knowledge and therefore perform a better link adaptation. However, we consider a half-duplex scenario where, at each time slot, the communication system should decide between sensing and communication. We thus propose to investigate the optimal policy to maximize the expected sum rate given a finite-time communication. % the following question therefore arises: At a given time slot, should one sense or communicate? We first show that this problem can be modelled in the Markov decision process (MDP) framework. We then demonstrate that the optimal open-loop and closed-loop policies can be found significantly faster than the standard backward-induction algorithm.
Minimizing the Outage Probability in a Markov Decision Process
Mar 03, 2023

Standard Markov decision process (MDP) and reinforcement learning algorithms optimize the policy with respect to the expected gain. We propose an algorithm which enables to optimize an alternative objective: the probability that the gain is greater than a given value. The algorithm can be seen as an extension of the value iteration algorithm. We also show how the proposed algorithm could be generalized to use neural networks, similarly to the deep Q learning extension of Q learning.