 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopological signature for periodic motion recognition
Apr 11, 2019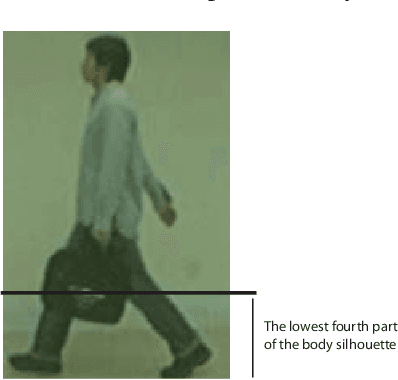
In this paper, we present an algorithm that computes the topological signature for a given periodic motion sequence. Such signature consists of a vector obtained by persistent homology which captures the topological and geometric changes of the object that models the motion. Two topological signatures are compared simply by the angle between the corresponding vectors. With respect to gait recognition, we have tested our method using only the lowest fourth part of the body's silhouette. In this way, the impact of variations in the upper part of the body, which are very frequent in real scenarios, decreases considerably. We have also tested our method using other periodic motions such as running or jumping. Finally, we formally prove that our method is robust to small perturbations in the input data and does not depend on the number of periods contained in the periodic motion sequence.