 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnytime Metaheuristic Framework for Global Route Optimization in Expected-Time Mobile Search
Dec 23, 2025Expected-time mobile search (ETS) is a fundamental robotics task where a mobile sensor navigates an environment to minimize the expected time required to locate a hidden object. Global route optimization for ETS in static 2D continuous environments remains largely underexplored due to the intractability of objective evaluation, stemming from the continuous nature of the environment and the interplay of motion and visibility constraints. Prior work has addressed this through partial discretization, leading to discrete-sensing formulations tackled via utility-greedy heuristics. Others have taken an indirect approach by heuristically approximating the objective using minimum latency problems on fixed graphs, enabling global route optimization via efficient metaheuristics. This paper builds on and significantly extends the latter by introducing Milaps (Minimum latency problems), a model-based solution framework for ETS. Milaps integrates novel auxiliary objectives and adapts a recent anytime metaheuristic for the traveling deliveryman problem, chosen for its strong performance under tight runtime constraints. Evaluations on a novel large-scale dataset demonstrate superior trade-offs between solution quality and runtime compared to state-of-the-art baselines. The best-performing strategy rapidly generates a preliminary solution, assigns static weights to sensing configurations, and optimizes global costs metaheuristically. Additionally, a qualitative study highlights the framework's flexibility across diverse scenarios.
Optimizing Mesh to Improve the Triangular Expansion Algorithm for Computing Visibility Regions
Jun 05, 2025This paper addresses the problem of improving the query performance of the triangular expansion algorithm (TEA) for computing visibility regions by finding the most advantageous instance of the triangular mesh, the preprocessing structure. The TEA recursively traverses the mesh while keeping track of the visible region, the set of all points visible from a query point in a polygonal world. We show that the measured query time is approximately proportional to the number of triangle edge expansions during the mesh traversal. We propose a new type of triangular mesh that minimizes the expected number of expansions assuming the query points are drawn from a known probability distribution. We design a heuristic method to approximate the mesh and evaluate the approach on many challenging instances that resemble real-world environments. The proposed mesh improves the mean query times by 12-16% compared to the reference constrained Delaunay triangulation. The approach is suitable to boost offline applications that require computing millions of queries without addressing the preprocessing time. The implementation is publicly available to replicate our experiments and serve the community.
* 30 pages, 43 figures (including subfigures)
Hybrid Filtering Heuristic for the Sensor-Placement Problem to Discretize 2D Continuous Environments
Oct 11, 2024



This paper addresses the sensor-placement problem (SPP) within the context of discretizing large, complex continuous 2D environments into graphs for efficient task-oriented route planning. The SPP aims to minimize the number of sensors required to achieve a user-defined coverage ratio while considering a general visibility model. We propose the hybrid filtering heuristic (HFH) framework, which enhances or combines outputs of existing sensor-placement methods, incorporating a filtering step. This step eliminates redundant sensors or those contributing marginally to the coverage, ensuring the coverage ratio remains within the desired interval. We implement two versions of HFH: the basic version and a variant, HFHB, incorporating a preprocessing technique known as bucketing to accelerate region clipping. We evaluate HFH and HFHB on a dataset of large, complex polygonal environments, comparing them to several baseline methods under both unlimited and limited-range omnidirectional visibility models. The results demonstrate that HFH and HFHB outperform baselines in terms of the number of sensors required to achieve the desired coverage ratio. Additionally, HFHB significantly reduces the runtime of more competitive baseline methods. We also adapt HFHB to a visibility model with localization uncertainty, demonstrating its effectiveness up to a certain level of uncertainty.
TřiVis: Versatile, Reliable, and High-Performance Tool for Computing Visibility in Polygonal Environments
Oct 11, 2024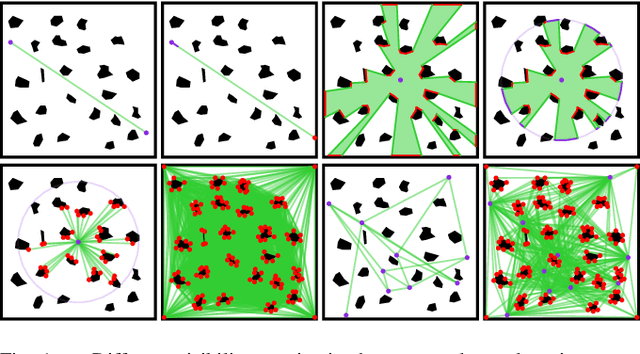

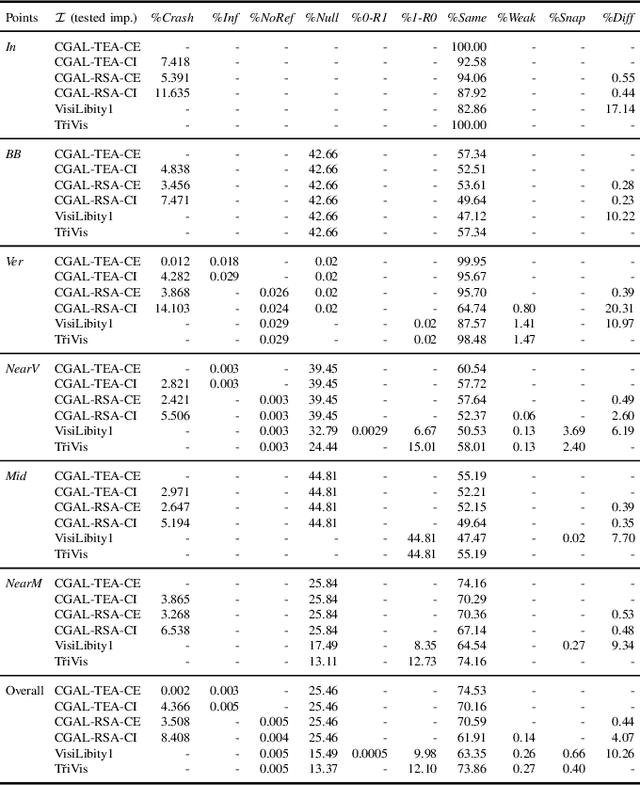
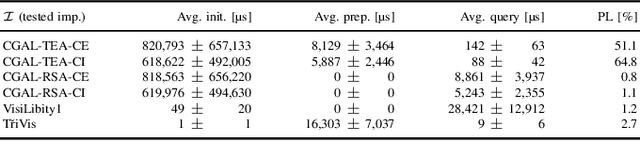
Visibility is a fundamental concept in computational geometry, with numerous applications in robotics, surveillance systems, video games, and other fields. This software paper presents T\v{r}iVis, a C++ library developed by the authors for computing numerous visibility-related queries in highly complex polygonal environments. Adapting the triangular expansion algorithm (TEA), T\v{r}iVis stands out as a versatile, high-performance, more reliable and easy-to-use alternative to current solutions that is also free of heavy dependencies. Through evaluation on a challenging dataset, T\v{r}iVis has been benchmarked against existing visibility libraries. The results demonstrate that T\v{r}iVis outperforms the competing solutions by at least an order of magnitude in query times, while exhibiting more reliable runtime behavior. T\v{r}iVis is freely available for private, research, and institutional use at https://github.com/janmikulacz/trivis.