 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnticipating Degradation: A Predictive Approach to Fault Tolerance in Robot Swarms
Apr 02, 2025An active approach to fault tolerance is essential for robot swarms to achieve long-term autonomy. Previous efforts have focused on responding to spontaneous electro-mechanical faults and failures. However, many faults occur gradually over time. Waiting until such faults have manifested as failures before addressing them is both inefficient and unsustainable in a variety of scenarios. This work argues that the principles of predictive maintenance, in which potential faults are resolved before they hinder the operation of the swarm, offer a promising means of achieving long-term fault tolerance. This is a novel approach to swarm fault tolerance, which is shown to give a comparable or improved performance when tested against a reactive approach in almost all cases tested.
Detecting and Diagnosing Faults in Autonomous Robot Swarms with an Artificial Antibody Population Model
Dec 27, 2024An active approach to fault tolerance is essential for long term autonomy in robots -- particularly multi-robot systems and swarms. Previous efforts have primarily focussed on spontaneously occurring electro-mechanical failures in the sensors and actuators of a minority sub-population of robots. While the systems that enable this function are valuable, they have not yet considered that many failures arise from gradual wear and tear with continued operation, and that this may be more challenging to detect than sudden step changes in performance. This paper presents the Artificial Antibody Population Dynamics (AAPD) model -- an immune-inspired model for the detection and diagnosis of gradual degradation in robot swarms. The AAPD model is demonstrated to reliably detect and diagnose gradual degradation, as well as spontaneous changes in performance, among swarms of robots of as few as 5 robots while remaining tolerant of normally behaving robots. The AAPD model is distributed, offers supervised and unsupervised configurations, and demonstrates promising scalable properties. Deploying the AAPD model on a swarm of foraging robots undergoing slow degradation enables the swarm to operate at an average of ~79\% of its performance in perfect conditions.
Predictive Fault Tolerance for Autonomous Robot Swarms
Sep 17, 2023Active fault tolerance is essential for robot swarms to retain long-term autonomy. Previous work on swarm fault tolerance focuses on reacting to electro-mechanical faults that are spontaneously injected into robot sensors and actuators. Resolving faults once they have manifested as failures is an inefficient approach, and there are some safety-critical scenarios in which any kind of robot failure is unacceptable. We propose a predictive approach to fault tolerance, based on the principle of preemptive maintenance, in which potential faults are autonomously detected and resolved before they manifest as failures. Our approach is shown to improve swarm performance and prevent robot failure in the cases tested.
QuaDUE-CCM: Interpretable Distributional Reinforcement Learning using Uncertain Contraction Metrics for Precise Quadrotor Trajectory Tracking
Jul 15, 2022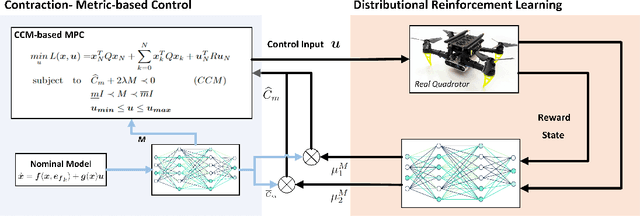
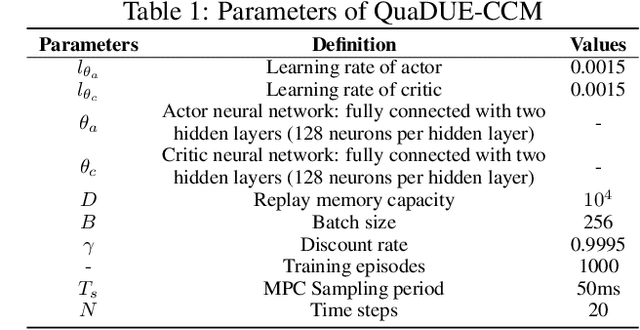
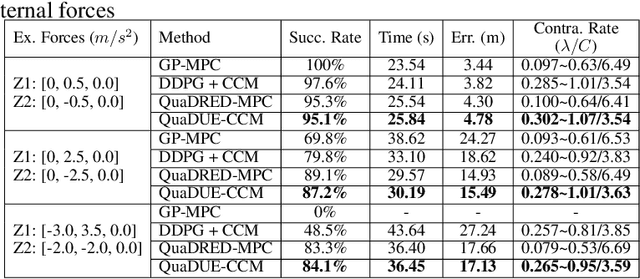
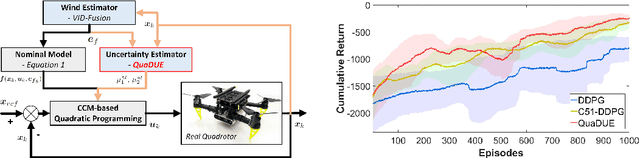
Accuracy and stability are common requirements for Quadrotor trajectory tracking systems. Designing an accurate and stable tracking controller remains challenging, particularly in unknown and dynamic environments with complex aerodynamic disturbances. We propose a Quantile-approximation-based Distributional-reinforced Uncertainty Estimator (QuaDUE) to accurately identify the effects of aerodynamic disturbances, i.e., the uncertainties between the true and estimated Control Contraction Metrics (CCMs). Taking inspiration from contraction theory and integrating the QuaDUE for uncertainties, our novel CCM-based trajectory tracking framework tracks any feasible reference trajectory precisely whilst guaranteeing exponential convergence. More importantly, the convergence and training acceleration of the distributional RL are guaranteed and analyzed, respectively, from theoretical perspectives. We also demonstrate our system under unknown and diverse aerodynamic forces. Under large aerodynamic forces (>2m/s^2), compared with the classic data-driven approach, our QuaDUE-CCM achieves at least a 56.6% improvement in tracking error. Compared with QuaDRED-MPC, a distributional RL-based approach, QuaDUE-CCM achieves at least a 3 times improvement in contraction rate.
Interpretable Stochastic Model Predictive Control using Distributional Reinforced Estimation for Quadrotor Tracking Systems
May 14, 2022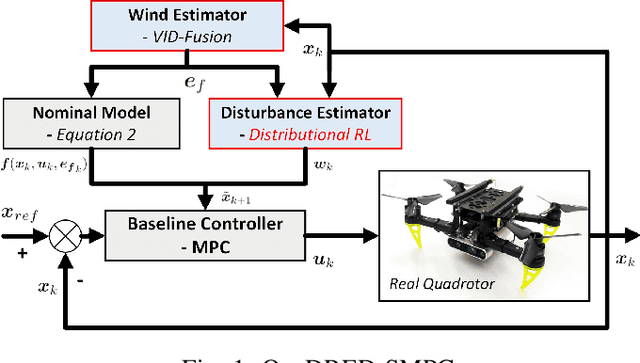
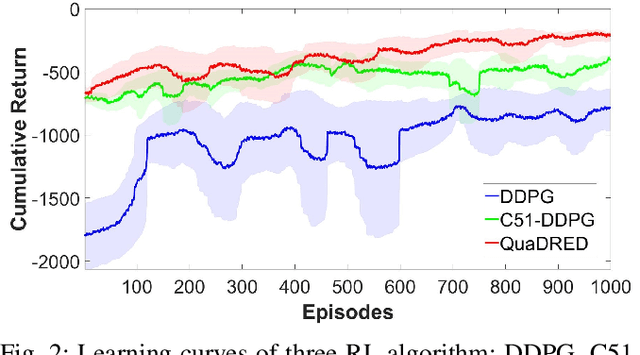
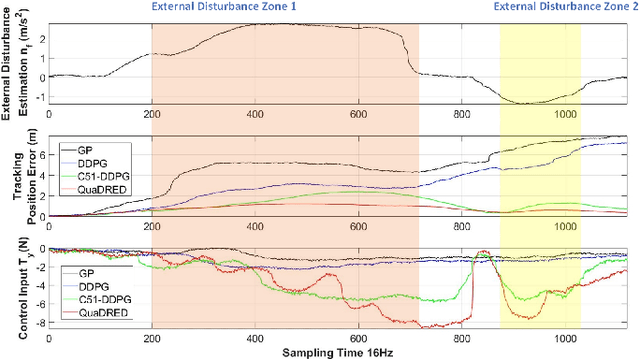
This paper presents a novel trajectory tracker for autonomous quadrotor navigation in dynamic and complex environments. The proposed framework integrates a distributional Reinforcement Learning (RL) estimator for unknown aerodynamic effects into a Stochastic Model Predictive Controller (SMPC) for trajectory tracking. Aerodynamic effects derived from drag forces and moment variations are difficult to model directly and accurately. Most current quadrotor tracking systems therefore treat them as simple `disturbances' in conventional control approaches. We propose Quantile-approximation-based Distributional Reinforced-disturbance-estimator, an aerodynamic disturbance estimator, to accurately identify disturbances, i.e., uncertainties between the true and estimated values of aerodynamic effects. Simplified Affine Disturbance Feedback is employed for control parameterization to guarantee convexity, which we then integrate with a SMPC to achieve sufficient and non-conservative control signals. We demonstrate our system to improve the cumulative tracking errors by at least 66% with unknown and diverse aerodynamic forces compared with recent state-of-the-art. Concerning traditional Reinforcement Learning's non-interpretability, we provide convergence and stability guarantees of Distributional RL and SMPC, respectively, with non-zero mean disturbances.
KinoJGM: A framework for efficient and accurate quadrotor trajectory generation and tracking in dynamic environments
Mar 12, 2022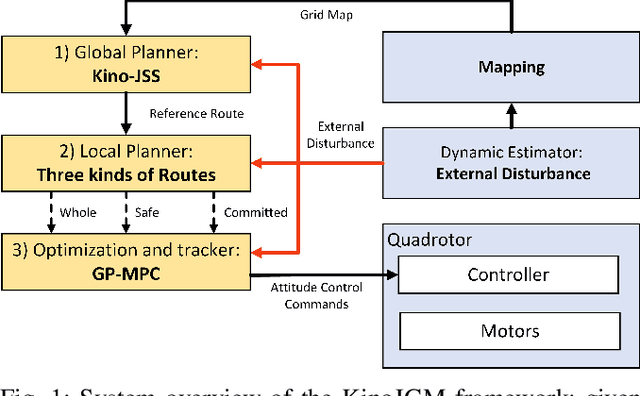
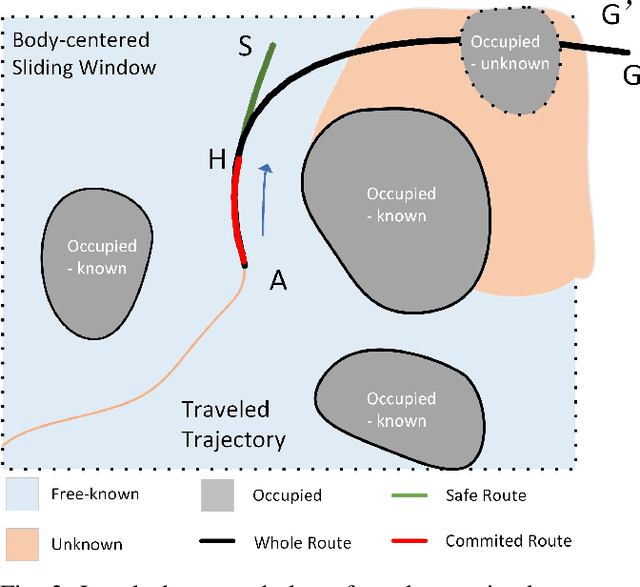
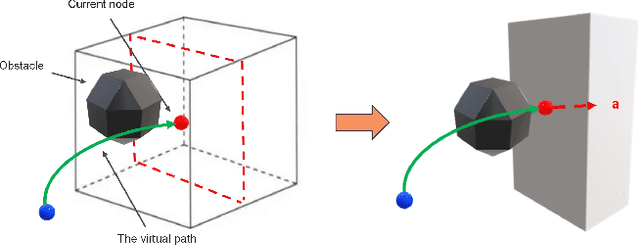
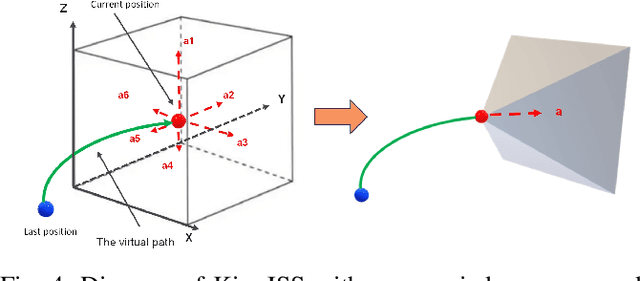
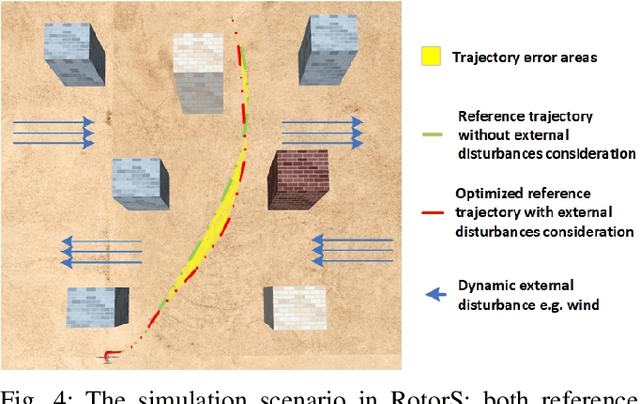
Unmapped areas and aerodynamic disturbances render autonomous navigation with quadrotors extremely challenging. To fly safely and efficiently, trajectory planners and trackers must be able to navigate unknown environments with unpredictable aerodynamic effects in real-time. When encountering aerodynamic effects such as strong winds, most current approaches to quadrotor trajectory planning and tracking will not attempt to deviate from a determined plan, even if it is risky, in the hope that any aerodynamic disturbances can be resisted by a robust controller. This paper presents a novel systematic trajectory planning and tracking framework for autonomous quadrotors. We propose a Kinodynamic Jump Space Search (Kino-JSS) to generate a safe and efficient route in unknown environments with aerodynamic disturbances. A real-time Gaussian Process is employed to model the effects of aerodynamic disturbances, which we then integrate with a Model Predictive Controller to achieve efficient and accurate trajectory optimization and tracking. We demonstrate our system to improve the efficiency of trajectory generation in unknown environments by up to 75\% in the cases tested, compared with recent state-of-the-art. We also demonstrate that our system improves the accuracy of tracking in selected environments with unpredictable aerodynamic effects.