 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Classification Trees for Continuous Feature Data Using Dynamic Programming with Branch-and-Bound
Jan 14, 2025



Computing an optimal classification tree that provably maximizes training performance within a given size limit, is NP-hard, and in practice, most state-of-the-art methods do not scale beyond computing optimal trees of depth three. Therefore, most methods rely on a coarse binarization of continuous features to maintain scalability. We propose a novel algorithm that optimizes trees directly on the continuous feature data using dynamic programming with branch-and-bound. We develop new pruning techniques that eliminate many sub-optimal splits in the search when similar to previously computed splits and we provide an efficient subroutine for computing optimal depth-two trees. Our experiments demonstrate that these techniques improve runtime by one or more orders of magnitude over state-of-the-art optimal methods and improve test accuracy by 5% over greedy heuristics.
Optimal Survival Trees: A Dynamic Programming Approach
Jan 09, 2024
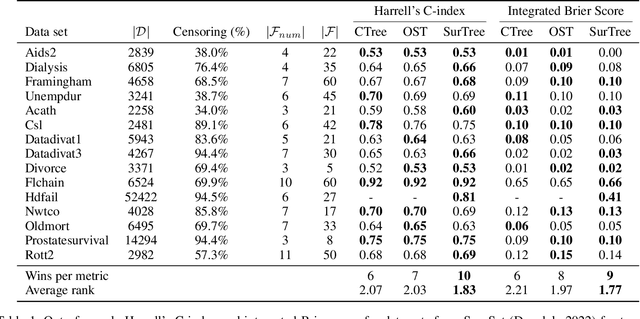
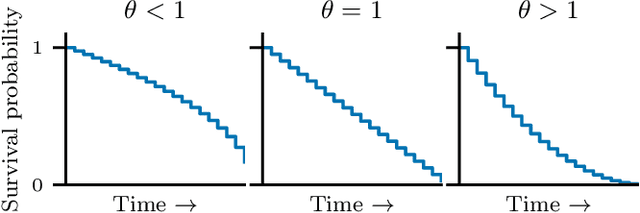

Survival analysis studies and predicts the time of death, or other singular unrepeated events, based on historical data, while the true time of death for some instances is unknown. Survival trees enable the discovery of complex nonlinear relations in a compact human comprehensible model, by recursively splitting the population and predicting a distinct survival distribution in each leaf node. We use dynamic programming to provide the first survival tree method with optimality guarantees, enabling the assessment of the optimality gap of heuristics. We improve the scalability of our method through a special algorithm for computing trees up to depth two. The experiments show that our method's run time even outperforms some heuristics for realistic cases while obtaining similar out-of-sample performance with the state-of-the-art.
Optimal Decision Trees for Separable Objectives: Pushing the Limits of Dynamic Programming
May 31, 2023Global optimization of decision trees has shown to be promising in terms of accuracy, size, and consequently human comprehensibility. However, many of the methods used rely on general-purpose solvers for which scalability remains an issue. Dynamic programming methods have been shown to scale much better because they exploit the tree structure by solving subtrees as independent subproblems. However, this only works when an objective can be optimized separately for subtrees. We explore this relationship in detail and show necessary and sufficient conditions for such separability and generalize previous dynamic programming approaches into a framework that can optimize any combination of separable objectives and constraints. Experiments on four application domains show the general applicability of this framework, while outperforming the scalability of general-purpose solvers by a large margin.