 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNR-SLAM: Non-Rigid Monocular SLAM
Aug 01, 2023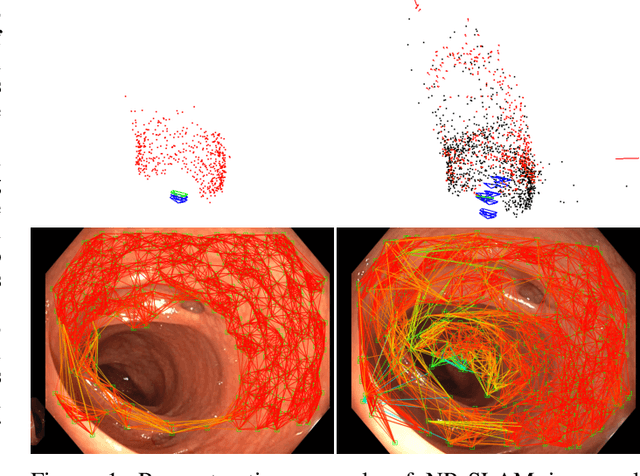
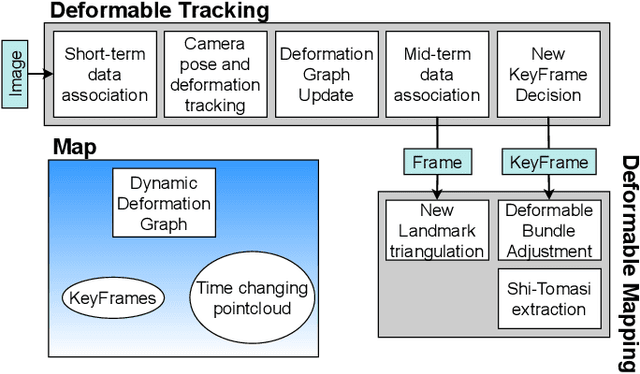
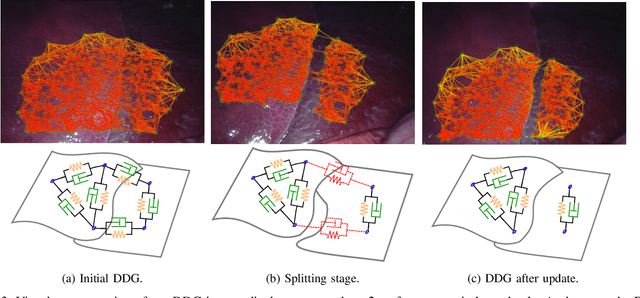
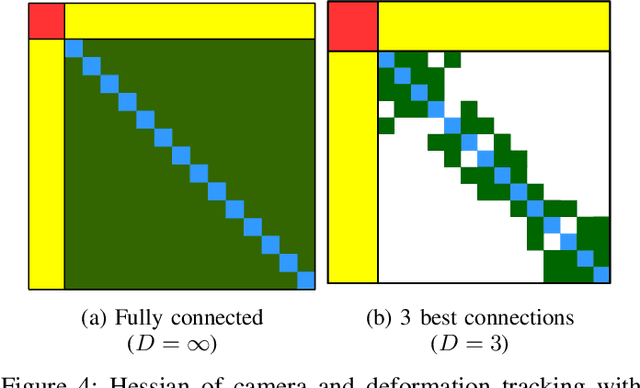
In this paper we present NR-SLAM, a novel non-rigid monocular SLAM system founded on the combination of a Dynamic Deformation Graph with a Visco-Elastic deformation model. The former enables our system to represent the dynamics of the deforming environment as the camera explores, while the later allows us to model general deformations in a simple way. The presented system is able to automatically initialize and extend a map modeled by a sparse point cloud in deforming environments, that is refined with a sliding-window Deformable Bundle Adjustment. This map serves as base for the estimation of the camera motion and deformation and enables us to represent arbitrary surface topologies, overcoming the limitations of previous methods. To assess the performance of our system in challenging deforming scenarios, we evaluate it in several representative medical datasets. In our experiments, NR-SLAM outperforms previous deformable SLAM systems, achieving millimeter reconstruction accuracy and bringing automated medical intervention closer. For the benefit of the community, we make the source code public.
Tracking monocular camera pose and deformation for SLAM inside the human body
Apr 18, 2022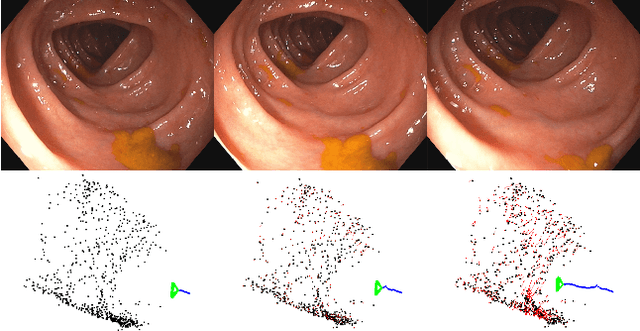
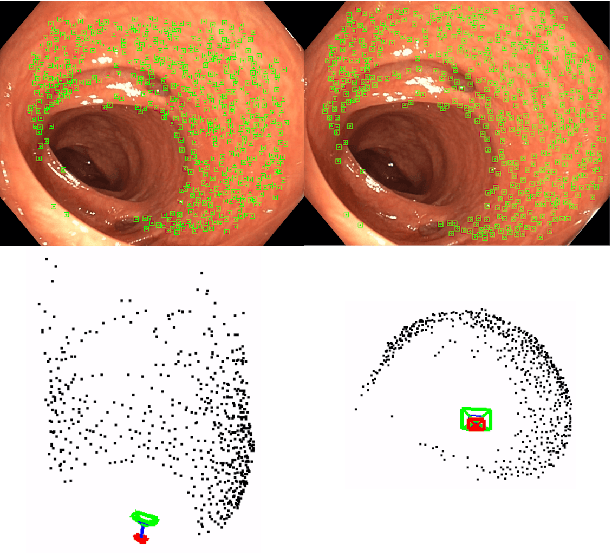
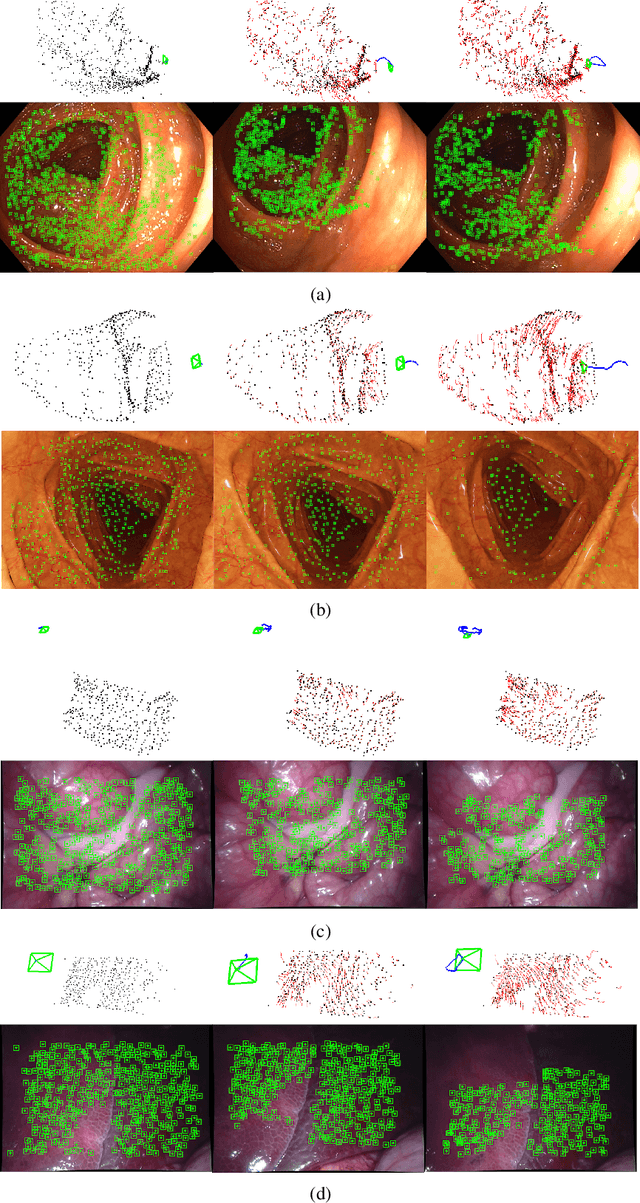
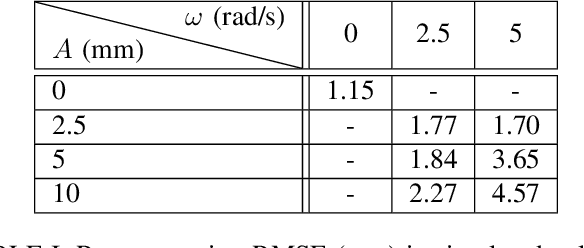
Monocular SLAM in deformable scenes will open the way to multiple medical applications like computer-assisted navigation in endoscopy, automatic drug delivery or autonomous robotic surgery. In this paper we propose a novel method to simultaneously track the camera pose and the 3D scene deformation, without any assumption about environment topology or shape. The method uses an illumination-invariant photometric method to track image features and estimates camera motion and deformation combining reprojection error with spatial and temporal regularization of deformations. Our results in simulated colonoscopies show the method's accuracy and robustness in complex scenes under increasing levels of deformation. Our qualitative results in human colonoscopies from Endomapper dataset show that the method is able to successfully cope with the challenges of real endoscopies: deformations, low texture and strong illumination changes. We also compare with previous tracking methods in simpler scenarios from Hamlyn dataset where we obtain competitive performance, without needing any topological assumption.