 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time 3D Object Detection Using InnovizOne LiDAR and Low-Power Hailo-8 AI Accelerator
Dec 07, 2024
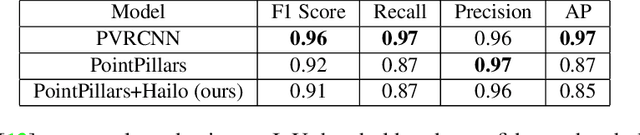
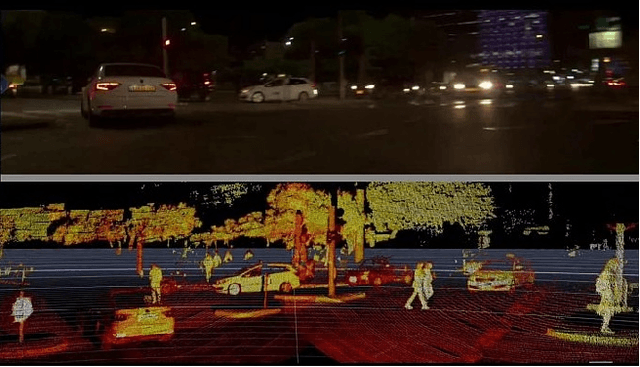
Object detection is a significant field in autonomous driving. Popular sensors for this task include cameras and LiDAR sensors. LiDAR sensors offer several advantages, such as insensitivity to light changes, like in a dark setting and the ability to provide 3D information in the form of point clouds, which include the ranges of objects. However, 3D detection methods, such as PointPillars, typically require high-power hardware. Additionally, most common spinning LiDARs are sparse and may not achieve the desired quality of object detection in front of the car. In this paper, we present the feasibility of performing real-time 3D object detection of cars using 3D point clouds from a LiDAR sensor, processed and deployed on a low-power Hailo-8 AI accelerator. The LiDAR sensor used in this study is the InnovizOne sensor, which captures objects in higher quality compared to spinning LiDAR techniques, especially for distant objects. We successfully achieved real-time inference at a rate of approximately 5Hz with a high accuracy of 0.91% F1 score, with only -0.2% degradation compared to running the same model on an NVIDIA GeForce RTX 2080 Ti. This work demonstrates that effective real-time 3D object detection can be achieved on low-cost, low-power hardware, representing a significant step towards more accessible autonomous driving technologies. The source code and the pre-trained models are available at https://github.com/AIROTAU/ PointPillarsHailoInnoviz/tree/main