 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkeleton-aware multi-scale heatmap regression for 2D hand pose estimation
May 23, 2021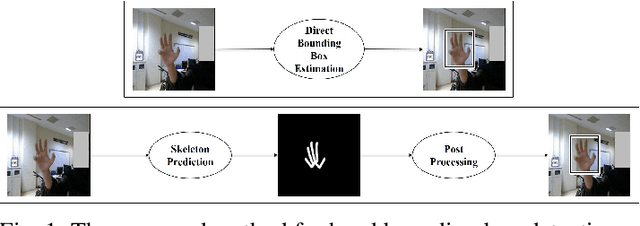
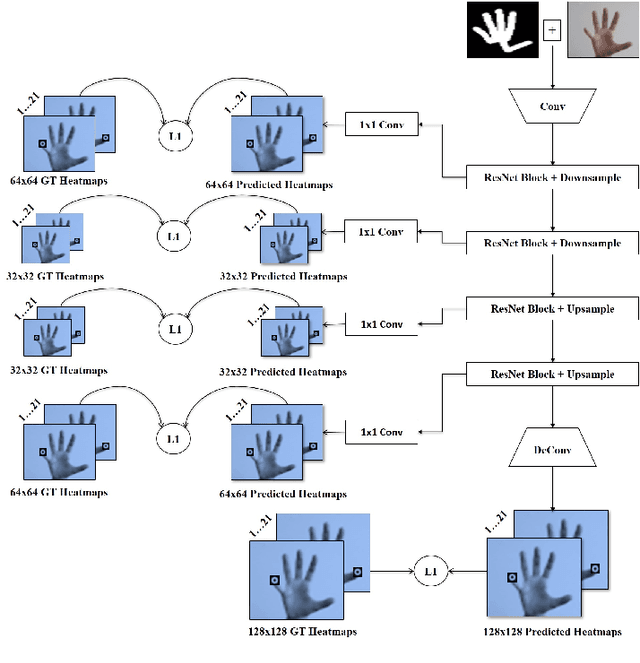

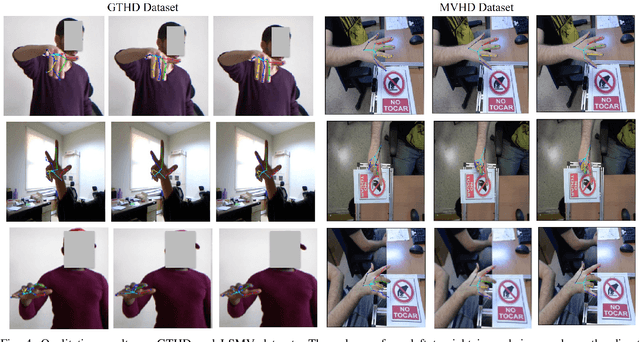
Existing RGB-based 2D hand pose estimation methods learn the joint locations from a single resolution, which is not suitable for different hand sizes. To tackle this problem, we propose a new deep learning-based framework that consists of two main modules. The former presents a segmentation-based approach to detect the hand skeleton and localize the hand bounding box. The second module regresses the 2D joint locations through a multi-scale heatmap regression approach that exploits the predicted hand skeleton as a constraint to guide the model. Furthermore, we construct a new dataset that is suitable for both hand detection and pose estimation. We qualitatively and quantitatively validate our method on two datasets. Results demonstrate that the proposed method outperforms state-of-the-art and can recover the pose even in cluttered images and complex poses.
A hybrid classification-regression approach for 3D hand pose estimation using graph convolutional networks
May 23, 2021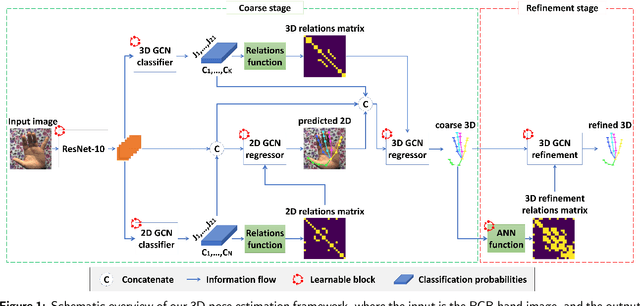
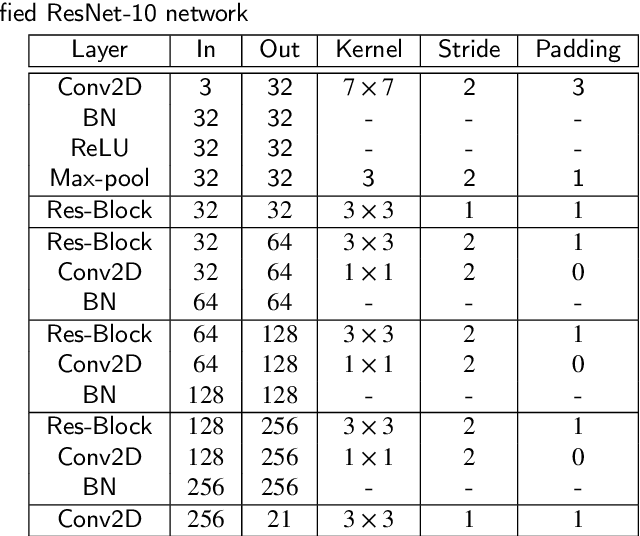
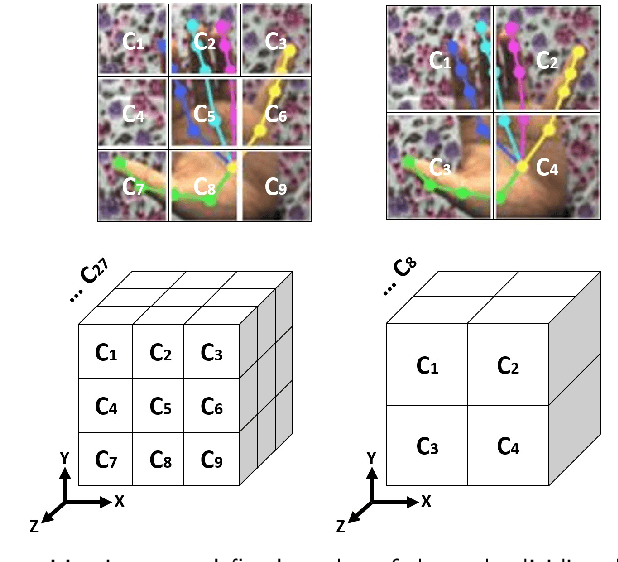
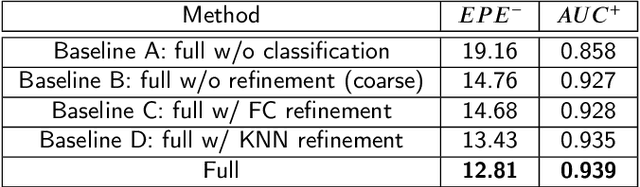
Hand pose estimation is a crucial part of a wide range of augmented reality and human-computer interaction applications. Predicting the 3D hand pose from a single RGB image is challenging due to occlusion and depth ambiguities. GCN-based (Graph Convolutional Networks) methods exploit the structural relationship similarity between graphs and hand joints to model kinematic dependencies between joints. These techniques use predefined or globally learned joint relationships, which may fail to capture pose-dependent constraints. To address this problem, we propose a two-stage GCN-based framework that learns per-pose relationship constraints. Specifically, the first phase quantizes the 2D/3D space to classify the joints into 2D/3D blocks based on their locality. This spatial dependency information guides this phase to estimate reliable 2D and 3D poses. The second stage further improves the 3D estimation through a GCN-based module that uses an adaptative nearest neighbor algorithm to determine joint relationships. Extensive experiments show that our multi-stage GCN approach yields an efficient model that produces accurate 2D/3D hand poses and outperforms the state-of-the-art on two public datasets.