 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy efficiency in Edge TPU vs. embedded GPU for computer-aided medical imaging segmentation and classification
Nov 20, 2023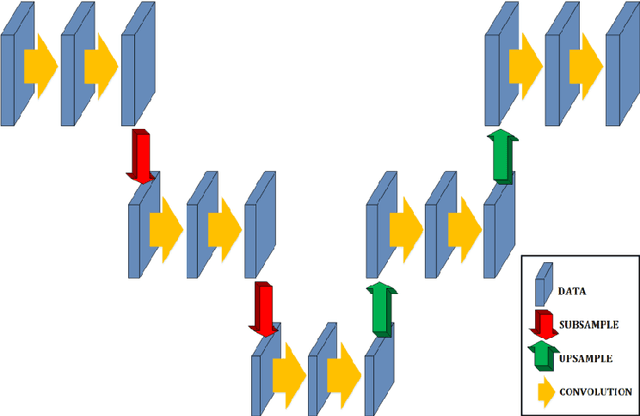
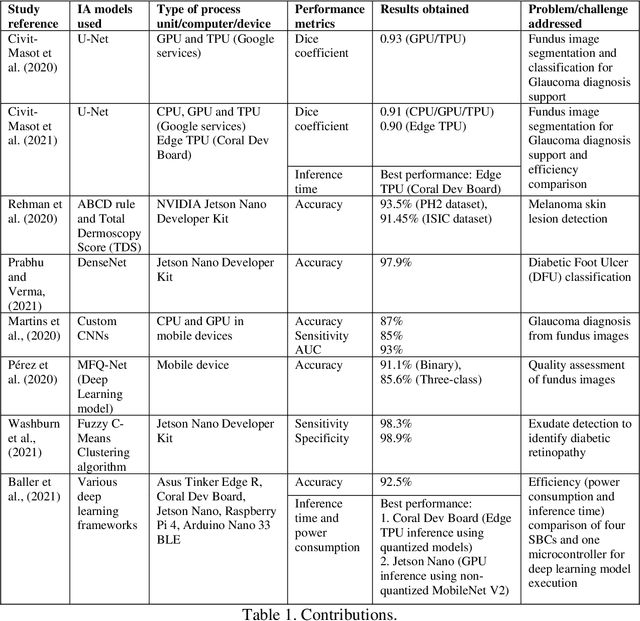
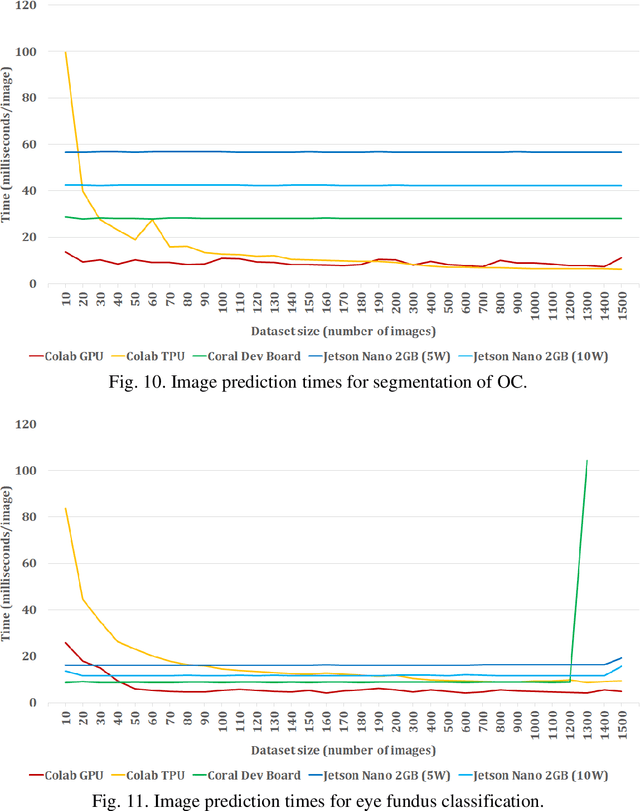
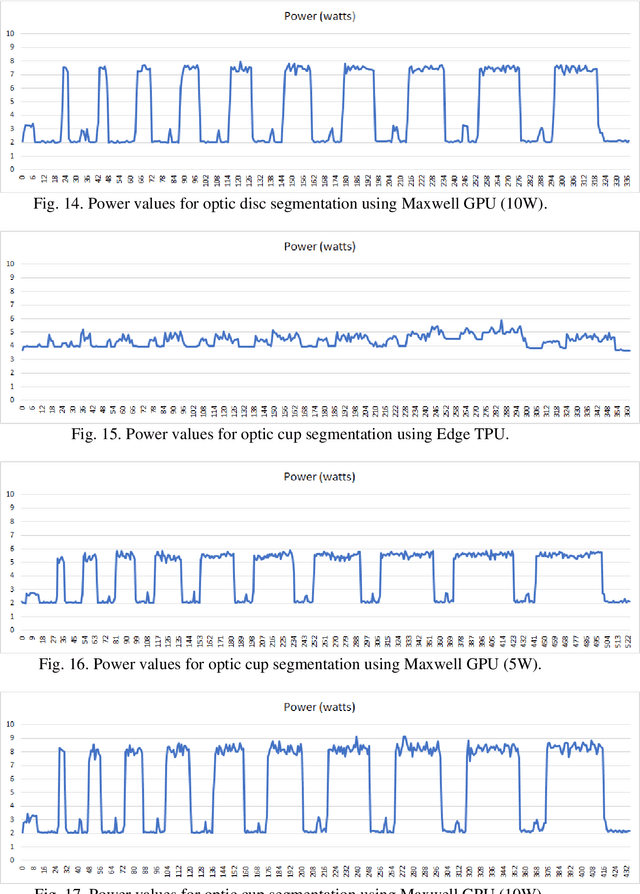
In this work, we evaluate the energy usage of fully embedded medical diagnosis aids based on both segmentation and classification of medical images implemented on Edge TPU and embedded GPU processors. We use glaucoma diagnosis based on color fundus images as an example to show the possibility of performing segmentation and classification in real time on embedded boards and to highlight the different energy requirements of the studied implementations. Several other works develop the use of segmentation and feature extraction techniques to detect glaucoma, among many other pathologies, with deep neural networks. Memory limitations and low processing capabilities of embedded accelerated systems (EAS) limit their use for deep network-based system training. However, including specific acceleration hardware, such as NVIDIA's Maxwell GPU or Google's Edge TPU, enables them to perform inferences using complex pre-trained networks in very reasonable times. In this study, we evaluate the timing and energy performance of two EAS equipped with Machine Learning (ML) accelerators executing an example diagnostic tool developed in a previous work. For optic disc (OD) and cup (OC) segmentation, the obtained prediction times per image are under 29 and 43 ms using Edge TPUs and Maxwell GPUs, respectively. Prediction times for the classification subsystem are lower than 10 and 14 ms for Edge TPUs and Maxwell GPUs, respectively. Regarding energy usage, in approximate terms, for OD segmentation Edge TPUs and Maxwell GPUs use 38 and 190 mJ per image, respectively. For fundus classification, Edge TPUs and Maxwell GPUs use 45 and 70 mJ, respectively.
* 37 pages, 20 figures. Accepted manuscript. Published in "Engineering Applications of Artificial Intelligence" (Elsevier), ISSN 0952-1976
Online programming system for robotic fillet welding in Industry 4.0
Dec 21, 2021



Fillet welding is one of the most widespread types of welding in the industry, which is still carried out manually or automated by contact. This paper aims to describe an online programming system for noncontact fillet welding robots with U and L shaped structures, which responds to the needs of the Fourth Industrial Revolution. In this paper, the authors propose an online robot programming methodology that eliminates unnecessary steps traditionally performed in robotic welding, so that the operator only performs three steps to complete the welding task. First, choose the piece to weld. Then, enter the welding parameters. Finally, it sends the automatically generated program to the robot. The system finally managed to perform the fillet welding task with the proposed method in a more efficient preparation time than the compared methods. For this, a reduced number of components was used compared to other systems, such as, a structured light 3D camera, two computers and a concentrator, in addition to the six axis industrial robotic arm. The operating complexity of the system has been reduced as much as possible. To the best of the authors knowledge, there is no scientific or commercial evidence of an online robot programming system capable of performing a fillet welding process, simplifying the process so that it is completely transparent for the operator and framed in the Industry 4.0 paradigm. Its commercial potential lies mainly in its simple and low cost implementation in a flexible system capable of adapting to any industrial fillet welding job and to any support that can accommodate it.
Improving the Reliability of Network Intrusion Detection Systems through Dataset Integration
Dec 02, 2021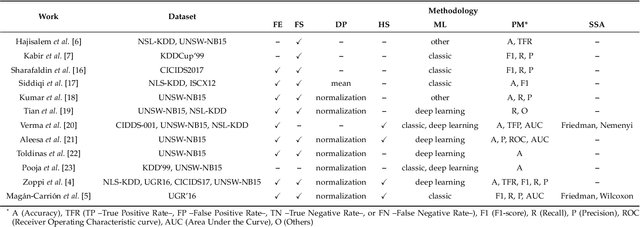
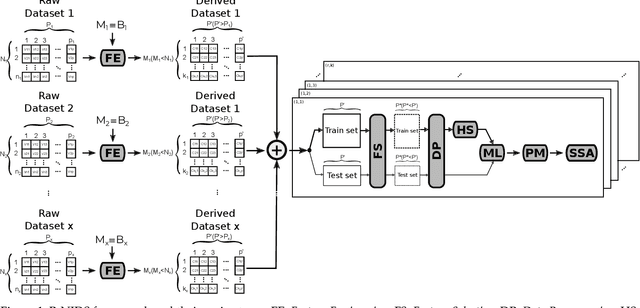

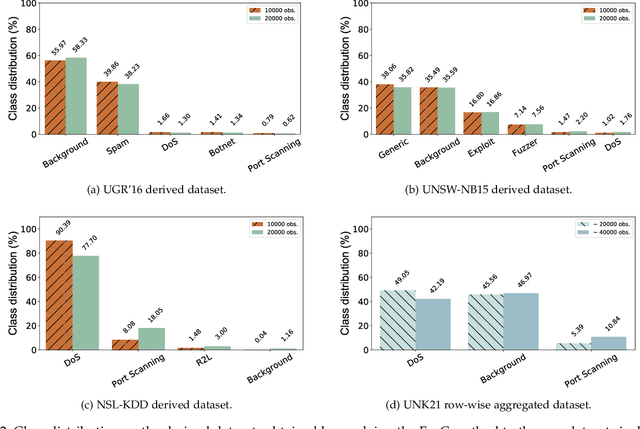
This work presents Reliable-NIDS (R-NIDS), a novel methodology for Machine Learning (ML) based Network Intrusion Detection Systems (NIDSs) that allows ML models to work on integrated datasets, empowering the learning process with diverse information from different datasets. Therefore, R-NIDS targets the design of more robust models, that generalize better than traditional approaches. We also propose a new dataset, called UNK21. It is built from three of the most well-known network datasets (UGR'16, USNW-NB15 and NLS-KDD), each one gathered from its own network environment, with different features and classes, by using a data aggregation approach present in R-NIDS. Following R-NIDS, in this work we propose to build two well-known ML models (a linear and a non-linear one) based on the information of three of the most common datasets in the literature for NIDS evaluation, those integrated in UNK21. The results that the proposed methodology offers show how these two ML models trained as a NIDS solution could benefit from this approach, being able to generalize better when training on the newly proposed UNK21 dataset. Furthermore, these results are carefully analyzed with statistical tools that provide high confidence on our conclusions.